Reading...
![]()
Play button
![]()
Play button
![]()
Use LEFT and RIGHT arrow keys to navigate between flashcards;
Use UP and DOWN arrow keys to flip the card;
H to show hint;
A reads text to speech;
305 Cards in this Set
- Front
- Back
- 3rd side (hint)
What are some important dimensions (length or distance, time)?
|
A unit is a label for a quantity.
unit + unit = unit unit - unit = unit unit x unit = unit^2 unit / unit = no unit Dimensions are powers of units. unit = one dimension. unit^2 = two dimension. unit^3 = three dimension. |
|
|
|
What are the definitions of scalar, vector, and components?
|
Scalar: without direction. For example, length, time, mass.
Vector: with direction. For example, displacement, acceleration, force. Components: the portion of the vector in a given direction. It is the part of the vector, such as the x-component, and the y-component. |
|
|
|
What are the gravity components on a slope?
|
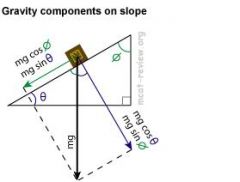
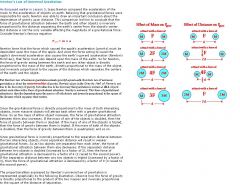
Anything that is dropped or projected into air, or allowed to be in a free fall on earth - the acceleration that that object experiences is due to gravity. It doesn't matter if it's in an elevator or something else that's moving at another acceleration, anything in free fall, meaning no forces are acting on it except gravity, experiences acceleration of g. All mass (solids, liquids, gases) are affected by gravity. Gas particles move so fast and for such short distances (because they are elastically colliding with each other) that gravity has a negligle effect on their behavior.
|
|
|
|
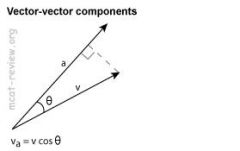
What are vector-vector components?
|
|
|
|
|
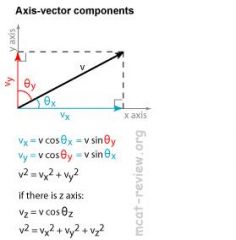
What are axis-vector components?
|
|
|
|
|
What are the Trigonometric rules?
|
SOH CAH TOA
SOH: sinθ = opposite / hypotenus. CAH: cosθ = adjacent / hypotenus. TOA: tanθ = opposite / adjacent. If you aren't given the angle, but you know the lengths of the triangle, then you don't need the angle. For instance, if you know that the adjacent length is 2 and the hypotenuse is 3, then cosθ = 2/3 and you can plug 2/3 in for where cosθ is supposed to be. Good to remember that sin30 = 0.5 and cos30 = 0.87 tan30 = 1/(sqrt3), or 1/1.7. Also tan60 = (sqrt3) or 1.7. Also, remember the 3-4-5 triangle and the 5-12-13 triangle for common lengths. |
|
|
|
How do you do vector addition?
|
You can only directly add vectors if they are in the same direction.
To add vectors in different directions, place the tail of one vector at the head of the other vector. Draw the vector sum from the tail of the first vector to the head of the second vector. The vector sum of all components of a vector equal to the vector itself. Operation involving a vector and a vector may or may not result in a vector (kinetic energy from the square of vector velocity or K = 1/2mv^2 results in scalar energy). Kinetic energy does not depend on direction, hence it must be a scalar, not a vector, even though it's derived from vectors. Operation involving a vector and a scalar always results in a vector. Operation involving a scalar and a scalar always results in a scalar. |
|
|

What average speed and velocity?
|
Speed: scalar, no direction, rate of change in distance.
Velocity: vector, has direction, rate of change in displacement. Average speed is rate = distance traveled/time taken. Average velocity FOR CONSTANT ACCELERATION is the average of the initial and final velocities which is: 1/2 (final velocity + initial velocity). For non-constant acceleration, average velocity is xfinal-xinitial/(tfinal-tinitial). In solving for velocity equations, we would solve for average velocity, because all of the motion equations involves constant acceleration. If acceleration is constant, then that means we have a changing velocity. Since we do not know the velocity at any one instant (like we would with instantaneous velocity using calculus), we use the average velocity. We can find the DISTANCE, not DISPLACEMENT of a moving object by multiplying the velocity by time. This velocity is still the average velocity (if there is a constant acceleration) but by multiplying it by time, we are finding the distance travelled by the object, not the displacement of the object. Speed can never be negative - speed is the magnitude of the velocity vector and is always positive. The average velocity of any constantly accelerating object that starts with zero velocity is the final velocity divided by two or 1/2(final velocity + initial velocity). |
|
|

What are free falling bodies?
|

A freely falling object is an object that moves under the influence of gravity only. The acceleration of all objects is the same in the absence of air resistance. As long as an object is in free fall in the air - regardless if it is tossed up, down, or sideways - its acceleration, which is g, is equal to 9.80 m/s^2 downwards on Earth.
•The equations for velocity, distance and time of the object depend on the direction of motion and position above or below the starting point. Make sure to keep the sign of gravity (positve or negative) constant when solving problems. Also, keep the directions (+ or -) constant. The acceleration due to gravity is constant and is directed towards the earth's center. In the absence of air resistance, any two bodies that are dropped from rest at the same moment will reach the ground at the same time regardless of their mass. Why? Because acceleration on earth is the same regardless, because really, we are not comparing the acceleration of the 2 objects to each other, we are comparing the acceleration of each individual object to the HUGE earth - the earth beats everybody when it comes to mass, so anything else that we compare the earth to, when it's on earth, is insignificant. The acceleration will always be g and so all the objects will fall at the same rate, at the same time, because we use acceleration to calculate time and everything else. This only works when the only forces working on the objects is gravity. Mass doesn't change the force of air resistance, but it does change the path of the projectile experiencing the air resistance. Since the force of air resistance remains constant for any mass, then, from F = ma, we see an inverse relationship between mass and acceleration; The acceleration is not g, it is the acceleration due to air resistance. So larger masses have less decceleration due to air resistance because acceleration decreases as mass increases (from the same amount of air resistance). |
|
|

What are projectiles?
|

•Projectiles are free falling bodies that is shot, thrown, or in some other way launched into the air. The motion or trajectory of a projectile is a parabola. A projectile motion consists of two independent parts: 1) Vertical motion at a constant downward acceleration toward the Earth, which is equal to a = -g = -9.80 m/s^2. 2) Horizontal motion at a constant horizontal speed, v = constant. The vertical acceleration of g toward the Earth holds true at all times, even when the projectile is traveling up (it's decelerating on its way up, which is the same thing as accelerating down). Gravity cannot change the object's horizontal speed, and the component of the object's horizontal velocity remains constant throughout its motion. There is no acceleration in the horizontal component. The object's vertical motion is the same as that of an object undergoing only vertical free-fall. Gravity only affects the object's vertical motion. When you toss something straight up and it comes down to where it started, the displacement, s, for the entire trip is 0. Also, initial velocity and acceleration are opposite in sign and Initial velocity and final velocity are equal and opposite. For this, time spent going up = time spent coming down. All horizontal motion has zero net force and no acceleration, but has constant velocity. The reason is that acceleration only acts in the downward direction.
The peak height can be found with: vsinΘ = square root of (2gh) A projectile exhibits symmetry: its path upward is the mirror image to its path downward. This means that for a projectile over a flat plane, time is the same for both halves of the flight and the initial speed is equal to the final speed. |
Masses are irrelevant in projectile paths.
|
|
|
What is the center of mass?
|
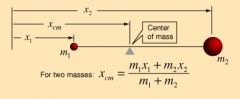
The concept of the center of mass is that of an average of the masses factored by their distances from a reference point.
•In a Cartesian coordinate, the center of mass is the point obtained by doing a weighted average for all the positions by their respective masses. •The center of mass of the Earth and a chicken in space is going to be almost at the center of the Earth, because the chicken is tiny, and its coordinate is weighted so. •The center of mass between two chickens in space is going to be right in the middle of the two chickens, because they're positions are weighted equally. •You do not have to obtain the absolute coordinates when calculating the center of mass. You can set the point of reference anywhere and use relative coordinates. •The center of mass for a sphere is at the center of the sphere. •The center of mass of a donut is at the center of the donut (the hole). The terms "center of mass" and "center of gravity" are used synonymously in a uniform gravity field to represent the unique point in an object or system which can be used to describe the system's response to external forces and torques. That's why for calculating the torque of a board, you use center of mass to calculate the distance from the fulcrum instead of the length of the whole board. |
|
|

What is the center of mass of particles?
|

The center of mass is the point at which all the mass can be considered to be "concentrated" for the purpose of calculating the "first moment", i.e., mass times distance. We are finding the distance to the center of mass for all of the particles.
|
|
|
|
What is Newton’s second law (F = ma)?
|
A net force acting on an object will cause that object to accelerate in the direction of the net force. If the object is accelerating in multiple directions due to the net force, the net force is not constant, but changing. The acceleration is proportional to the force and inversely proportional to the mass. F=ma. The unit for force is the Newton. Both force and acceleration are vectors because they have a direction. If in a question an apple falls to the ground, the force of gravity acts downwards, and the apple falls downwards. More difficult questions have directional attributes associated with them. For example, when a bar of soap slides down an inclined plane, the force of gravity acts downwards, but the acceleration is not completely downwards, but is "slanted". Therefore, you need to do vector analysis for those questions.
Force is in Newtons : kg* m/s^2 |
|
|
|
What is Newton’s first law (inertia)?
|
It states that if the vector sum of all forces (that is, the net force) acting on an object is zero, then the acceleration of the object is zero and its velocity is constant. Without an external force acting on an object, nothing will change about that object in terms of speed and direction. In the absence of an external force: 1)Something at rest will remain at rest 2) Something in motion will remain in motion with the same speed and direction. Inertia is the resistance of any physical object to a change in its state of motion. It is represented numerically by an object's mass. When the mass is moving, the mass has mometum (mass times velocity). If a question asks about inertia, compare the masses, not the velocities. If it asks about momentum, compare the mass times velocites. Inertia is not the tendency of objects to find a state of rest and remain at rest, it is the tendency of objects to remain in its present state of motion, which could be at rest, but it could also be at its constant motion. Newton's first law, the law of inertia only speaks to the case of a single mass. It is true though that conservation of momentum implies that the center of mass of a system of objects will continue at constant velocity as long as the interactions are internal and not the product of outside forces. In fact conservation of momentum can be seen as a law of inertia for a system of masses.
|
|
|
|
What is Newton’s third law (forces equal and opposite)?
|
Every action has a reaction equal in magnitude and opposite in direction. Say you have a continent of mass m collides with another continent of mass m/2 that is initially at rest. During the collision, the more massive continent is found to exert a force F on the less massive continent, causing the smaller continent to accelerate. At the same time, the less massive continent exerts a force on the larger continent of a magnitude F. Newton's third law requires that mutual forces exerted between these two continent collisions (or any collision) be equal in magnitude. The smaller continent accelerates because it exerted a force F on the larger continent, but the larger continent has a greater mass, so it doesn't accelerate like the smaller continent. It is essential to understand that the reaction applies to another body that the one on which the action itself applies. For instance, in the context of gravitation, when object A attracts object B (action), then object B simultaneously attracts object A (with the same intensity and an opposite direction). Another important point to keep in mind is that the physical nature of the reaction force is identical to that of the action itself: if the action is due to gravity, the reaction is also due to gravity. Since a force by an object produces a reactionary force on an object, the reactionary force exerted on an object has a negative acceleration, which means that it exerts a negative velocity and negative speed on the object - which slows the object that exerted the force down.
|
|
|

What is the Concept of a field?
|
•For the purposes of the MCAT, fields are lines. It is a mathematical description of how matter affects and moves other matter in the Space around it. The electromagnetic field is a vector (directional) quantity that defines force and direction of acceleration of many charged particles upon one another. •When lines are close together, that's shows a strong field. •When lines are far apart, that shows a weak field. •Things travel parallel, perpendicular, or spiral to the field line.
|
|
|

What is the law of gravitation?
|
Newton's law of universal gravitation states that every massive particle in the universe attracts every other massive particle with a force which is directly proportional to the product of their masses and inversely proportional to the square of the distance between them. Gravity decreases with the square of the distance. If the distance increases two fold, gravity decreases by a factor of four. The "distance" is the distance from the center of mass between the two objects, not the distance between the surfaces. Gravity is the weakest of the four universal forces. This weakness is reflected in the universal gravitational constant, G, which is orders of magnitude smaller than the Coulomb's constant. The gravitational force EVERYWHERE inside a uniformly dense sphere or ring, due THAT sphere or ring (not another) is zero because there is no radius that we're calculating from. So, if you have an object anywhere inside that sphere or ring, it won't feel a gravitational force due to that ring. However, if there is another sphere or ring that is exerting a gravitational force separate from the sphere or ring the particle is on, then it will experience a force from that ring. For objects bound in orbit, the total energy has to be negative because the potential energy has to be greater than the kinetic energy and the potential energy is negative. Otherwise, the objects would escape the orbit and overcome the potential energy with it's kinetic energy and would leave the orbit. The gravitational force would not be able to perform enough work to slow the object down as it went out the orbit. The units for electric field is N/C while the units for gravitational field is N/kg.
|
|
|
|
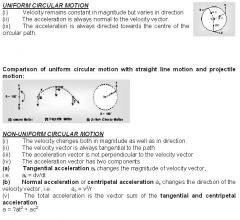
What are the equations of uniform circular motion?
|

•note that theta is always in radians. To convert degrees to radians, use this formula: 2π radians = 360°.
•The simple harmonic laws of frequency and period applies here also. |
|
|
|
Explain some of the concepts of speed, velocity, and displacement related to circular motion.
|
Velocity is displacement over time. Speed is the distance over time. •Displacement is the shortest, straight-line distance between two points on the perimeter of a circle (This is called the chord). Distance is both circumference and arc. Some typical cases: ◦For displacements and distances that approach zero, the instantaneous velocity equals the speed. For a quarter around the circle (π/4 radians or 45°), the displacement is the hypotenuse of a right-angled triangle with the radius as the other two sides. Using Pythagoras, the displacement is square root of 2r^2. The distance is the arc of 1/4 circumference. ◦For half around the circle, the displacement is the diameter and the distance is the half the circumference. ◦For three quarters around the circle, the displacement is again obtained by Pythagoras. The magnitude of the displacement here is the same as that at a quarter of a circle, but the direction is different. The distance, is 3/4 of the circumference. ◦Complete around the circle, the displacement is zero, which makes the velocity also zero. The distance is the circumference. •The velocity is always less or equal to the speed. •The displacement is always less or equal to the distance. •Displacement and velocity are vectors. Distance and speed are not.
|
|
|

What is Centripetal force (F = –mv^2/r)?
|
Centripetal force is a force that makes a body follow a curved path and is due to centripetal acceleration. Centripetal acceleration is due to changes in velocity when going around a circle. The change in velocity is due to a constant change in direction. •Centripetal force: F = –mv^2/r
◦Sometimes a negative sign is used for centripetal force to indicate that the direction of the force is toward the center of circle. •Centripetal acceleration: a = v^2/r •The direction of both the acceleration and the force is ALWAYS toward the center of the circle. •The tension force in the string (attached to the object going in circles) is the same as the centripetal force. •When the centripetal force is taken away (Such as when the string snaps), the object will fly off in a path tangent to the circle at the point of snap. The centripetal acceleration around the earth is the same as the acceleration due to gravity around the earth, g. So when solving problems, set both equal to each other (GM/r^2 = v^2/r = a = g because F = GMm/r^2, F = ma, and F = mv^2/r, where M is the mass of the Earth and m is the mass of the object). You don't need to know the speed of the object if you have an idea of what the radius is. If you don't know the radius, then you need to know the speed. When the speed of an object in a circle is increasing or decreasing (accelerating or decelerating), their acceleration is not constant anymore. You need to figure out the vector sum of the tangential acceleration and the centripetal acceleration to get the actual acceleration. |
|
|
|
What is weight?
|
Weight is the force that acts on a mass. •Weight is a force. It has a magnitude and a direction. It is a vector. •Because it is a force, F=ma holds true. •Your weight on the surface of the Earth: F=mg, where g is the acceleration due to Earth, which is just under 10. •You weight less when you are further away from the Earth because the force of gravity decreases with distance. •However, you are not truly "weightless" when orbiting the Earth in space. You are simply falling toward the Earth at the same rate as your space craft. •You gain weight as you fall from space to the surface of the earth. •For a given mass, its weight on Earth is different from its weight on the Moon.
|
|
|

What is friction (static and kinetic)?
|
Friction is a force that is always in the direction to impede motion. μ is the coefficient of friction and N is the normal force. •Like any other force, friction is a vector. However, its direction is easy because it's always opposite to motion. •The coefficient of friction is intrinsic to the material properties of the surface and the object, and is determined empirically. •The normal force at a horizontal surface is equal to the weight •The normal force at an inclined plane is equal to the weight times the cosine of the incline angle. If there is a block on a board and the board from a horizontal position and raise one end of it, the block will slide. The only way to measure the static friction is to find out the normal force, which is only calculated by finding the angle of the board. A board tilted at an angle with respect to the horizontal causes a component of the gravitational force on the block to point down the length of the board. The coefficient of static friction is the ratio of the force along the board to the normal force (which also changes because of the angle). The mass of the block cancels in the ratio. Only the angle of the tilt determines the static friction result. Not the time for the block to slide down the board, not the distance the block slid down the board before coming to rest, and not the mass of the board. •We can walk and cars can run because of friction.
•Lubricants reduce friction because they change surface properties and reduce the coefficient of friction.•Every time there is friction, heat is produced as a by-product. The FORCE OF FRICTION (Static and kinetic) is EQUAL AND OPPOSITE TO THE APPLIED FORCE!!! So, if you have a weight at rest, there is no force of friction. It's chillin. If you have something pushing that object, but the object doesn't bulge, then the force of friction is equal the the amount of force used to push that object. That force of friction = μN. N could be the weight of the object, which could be a larger force than the applied force. The coefficient of static friction is what divides the N and make it equal to the force of friction (for instance, the weight could be 50 N and the applied force could be 10 N, so the coefficient of friction is 1/5 where Force of friction = μ*50N = 10N, and μ = 1/5. When I figure out frictional forces, realize that the MAXIMUM static frictional force is F = μFn, where Fn is the normal. But the ACTUAL static frictional force could be less and is the applied force. So applied forces can be different values that are less that what the maximum force is. Once the applied force is beyond the maximum static frictional force, the object moves. |
|
|

How are the normal force and frictional force divided on an inclined plane?
|
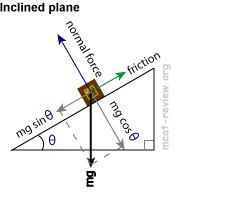
•Gravity is divided into two components on an inclined plane.
◦One component is normal (perpendicular) to the plane surface: FN = mg·cosθ. This component is used to calculate the frictional force and static force. ◦The other component is parallel to the plane surface: F|| = mg·sinθ. This is used to calculate the force down the plane. •To prevent the object from crashing through the surface of the inclined plane, the surface provides a normal force that is equal and opposite to the normal component of gravity. •Friction acts parallel to the plane surface and opposite to the direction of motion. •In a non-moving object on an inclined plane: normal component of gravity = normal force; parallel component of gravity = static friction. •Unless the object levitates or crashes through the inclined plane, the normal force always equals the normal component of gravity. Frictional force is not a fundamental force (like gravitational, strong force, electromagnetic, and weak force). Frictional force is derived from electromagnetic force between charged particles, including electrons, protons, atoms, and molecules, and so cannot be calculated from first principles, but instead must be found empirically. So, when an object on an incline is not moving because of a greater static frictional force than the force down the incline, the object is not moving, so the net force is zero. The net force is not referring to the static frictional force, because it is not zero. It is just that the all of the forces acting on the object is balanced, so net force is zero and the object isn't moving. |
|
|
|
What are the analysis of pulley systems?
|
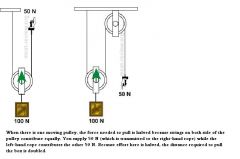
Pulleys reduce the force you need to lift an object. The catch - it increases the required pulling distance.
•Rule of thumb: The ropes on either side of a moving pulley contributes to pulling the load. •The MCAT will most probably give you simple pulleys where only the above rule is applicable. •Complex pulleys will have additional ropes that contribute to the pulling of the load (most likely not tested on the MCAT). •The distance of pulling increases by the same factor that the effort decreases. Pulleys (anything of mechanical advantage) reduce the amount of force required, but does not affect work. Pulleys (and ramps and levers) allow force to work over a greater distance and do the same amount of work with less force. They key to understanding pulleys is remembering that tension throughout a massless, frictionless pulley is constant. If you have 1 rope, the tension is the same at every point of the rope and the force necessary to lift the mass is mg (the weight). The best way to solve pulley problems is to first figure out the tension of the rope holding the mass, then equate that tension to the force required to lift the mass. Tension in a single rope in an ideal pully is the same throughout the rope. So if you calculate the tension of 1 part of a rope in a pulley, then all ropes have that tension, and that tension is equal to the minimum force needed to pull the pulley and lift the mass. |
|
|
|
Review this pulley system.
|

|
|
|
|
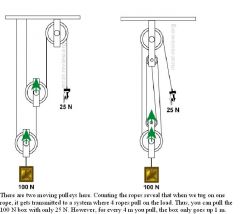
Review this pulley system.
|
|
|
|
|
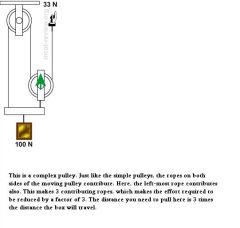
Review this pulley system.
|
|
|
|
|
Review this pulley system.
|
|
|
|
|
What is force?
|
•There are 4 universal four-ces... get it? Universal forces are also called fundamental forces. The four forces are: The strong force: also called the nuclear force. It is the strongest of all four forces, but it only acts at subatomic distances. It binds nucleons together (binds protons and neutrons together to form the nucleus of an atom). Electromagnetic force: about one order of magnitude weaker than the strong force, but it can act at observable distances. Binds atoms together. Allows magnets to stick to your refrigerators. It is responsible for the fact that you are not falling through your chair right now (MCAT people love to throw you quirky examples like this one). Weak force: roughly 10 orders of magnitude weaker than the strong force. Responsible for radioactive decay. Gravity: roughly 50 orders of magnitude weaker than the strong force. Responsible for weight (not mass!). Also, responsible for planet orbits.
|
|
|
|
What is equilibrium?
|
•When something is in equilibrium, the vector sum of all forces acting on it = 0.
•Another way to put it: when something is in equilibrium, it is either at rest or moving at constant velocity. •Yet another way to put it: when something is in equilibrium, there is no overall acceleration. |
|
|
|
What is the concept of force and its units?
|
•Force makes things accelerate, change velocity or change direction.
•In the MCAT, a force is indicated by an arrow. •The direction of the arrow is the direction of the force. •The magnitude of the force is often labeled beside the arrow. •F=ma, so the unit for the force is kg·m/s^2 When solving force equations, the force may be happening at an angle instead of vertical or horizontal. When figuring out what the object will accelerate and where, break the force down into it's vertical and horizontal components and solve for the acceleration using the component that's in the direction of the force. So if the force is going in the horizontal direction, use the horizontal component of force when using F = ma. This force can also be used for friction, if the block is sliding. A quick way to solve acceleration problems is that if something is not moving at constant velocity, ie. it has a net force/acceleration, then add 'ma' to the weaker side in order the balance the equilibrium equation of forces. |
|
|
|
What is Translational equilibrium (Sum of Fi = 0)?
|
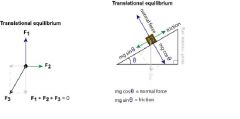
•When things are at translational equilibrium, the vector sum of all forces = 0.
•Things at translational equilibrium either don't move, or is moving at a constant velocity. •If an object is accelerating, it's not in equilibrium. •Deceleration is acceleration in the opposite direction. •At translational equilibrium: ◦An apple sitting still. ◦A car moving at constant velocity. ◦A skydiver at falling at terminal velocity. •NOT at translational equilibrium: ◦An apple falling toward the Earth with an acceleration of g. ◦A car either accelerating or decelerating. ◦A skydiver before he or she reaches terminal velocity. |
|
|
|
What is the Analysis of forces acting on an object?
|
•Draw force diagram (force vectors).
•Split the forces into x, y and z components (normal and parallel components for inclined planes). •Add up all the force components. •The resulting x, y and z components make up the net force acting on the object. •Use Pythagoras theorem to get the magnitude of the net force from its components. •Use trigonometry to get the angles. |
|
|

What is the significance of Newton’s first law (inertia)?
|

•The significance of Newton's first law on equilibrium is: things in equilibrium will remain in equilibrium unless acted on by an external force. •The significance of Newton's first law on inertia is: Inertia is the resistance of any physical object to a change in its state of motion. It is represented numerically by an object's mass. Inertia means that an object will always continue moving at its current constant speed and in its current direction until some force causes its speed or direction to change. The quantity that measures how difficult it is to change the state of motion of an object is called the mass of the object. Mass is a fundamental measure of inertia; it measures the resistance of the body to changes in its motion. Thus, inertia is resistance to motion changes. Whereas, momentum is mass in motion, and, is defined as the mass times the velocity. Inertia also explains why two objects of different masses fall at the same rate. For instance, a 6 kg ball experiences a force due to gravity that is 2000 greater than the gravitational force experience by a 3 g ball. The 6kg ball has 2000 times more inertia (mass), so it requires a force 2000 times greater to change its motion a the same rate. Acceleration is independent of the mass both of the balls, so it doesn't change. Because acceleration is independent of mass, the distance and time needed to stop an object (regardless of how large - how much mass the object is) is independent of its mass and surface area. Distance and time needed to stop an object is dependent on acceleration (because we use the kinematics equations to solve for them), and acceleration is independent of mass. An object moving at constant velocity will also move at constant speed. But an object moving at constant speed doesn't necessarily have to be moving at constant velocity (centripetal force).
|
|
|
What is Torque?
|
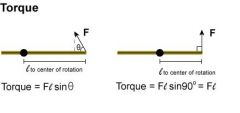
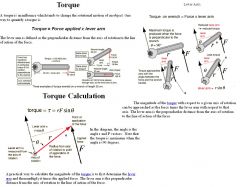
The lever arm is defined as the perpendicular distance from the axis of rotation to the line of action of the force. The lever arm does not necessarily equal the wrench, or whatever straight object we are referring to. It can be perpendicular to the force applied to the object in space. Note that it's the LINE OF ACTION of the force - the lever arm and the force don't necessarily have to be in the same direction, meaning the lever arm and force doesn't have to touch at right angles, but the lever arm has to make a right angle with the line of action of the force. ◦Torque is the angular equivalent of a force - it makes things rotate, have angular acceleration, change angular velocity and direction. The axis of rotation is where on the object the rotating (twisting) is taking place. The convention is that positive torque makes things rotate anticlockwise and negative torque makes things rotate clockwise. Torque can be solved with respect to the lever arm OR with respect to the radius of of object to the point of force : Torque = rFsinθ. When you have a problem that does NOT imply there is a fulcrum, instead, you have a board that is held up by a rope and also has 1 mass (or more) hanging from it - it is an equilibrium question. Basically, first analyze what the regular forces are - the forces that are up (usually the tension from the rope) and the forces that are down (usually the weight of the mass(es) and the board). Then use that equation to figure out the counterclockwise and clockwise torques. But here, since we don't have a designated fulcrum, we can pick our fulcrum anywhere we want (where the rope is is not necessarily where the fulcrum is). The easiest way to do this is to pick the fulcrum (point of rotation) to be at the end of the board. Then, when figuring out the torque, use the distance as the distance of the mass(es), rope, and center of gravity of the board from the end of the board. Don't forget that the board uses the center of gravity to find the distance from the fulcrum when calculating the torque - that is where the mass is concentrated for the board.
|
|
|

What is a lever arm for torque?
|

The lever arm is rsinθ. Torque = lever arm * force applied = F*rsinθ. The angle θ is the angle opposite the lever arm. The lever arm is defined as the perpendicular distance from the axis of rotation to the line of action of the force. If you are given a question that says a number of objects has the same force, which has the most torque - choose the longest lever arm. Don't forget that lever arm is not the same thing as the axis of rotation - it's the perpendicular distance from the axis of rotation to the line of action of the force. So once you draw the lever arm, whichever one has the longest has the largest torque. If you have a problem where you have to balance a board with 2 masses on it, or 1 mass on it, you have to set the counterclockwise torque to the clockwise torque. Basically, all that means is finding the torque of the object on one side of the board to the point of rotation (the point could be a rope, a fulcrum, whatever) and setting it to the clockwise torque, which is the torque of the board. The clockwise torque is found by first, figuring out what the center of mass of the board is because the location of the center of mass of the board is where the mass of the board is concentrated. Then, you find the distance of the center of mass from the fulcrum. That is the lever arm for the board. Then you multiply that distance (the lever arm) by the weight of the board (mg). If you have multiple masses on a board, the same strategy exists. Figure out what you're balancing on either side of the fulcrum. Depending on what side the center of mass of the board is to the fulcrum depends on whether you add the torque of the board to the left side of the equation where one of the masses is or the right side of the equation where one of the masses is. When calculating the distance of the mass on either side of the board, calculate the distance of the mass to the fulcrum, not the distance of the mass to the end of the board. Lever arm and force are inversely proportional, the greater one is, the smaller the other.
|
When doing torque problems, it is helpful to draw the directions of the torques. The forces up equal the forces down, the forces to the left equal the forces to the right, and the clockwise torques equal the counter-clockwise torques.
|
|

What is Weightlessness?
|
Weightlessness, the sensation of feeling no forces
•There are two kind of weightlessness - real and apparent. ◦Real weightlessness: when there is no net gravitational force acting on you. Either you are so far out in space that there's no objects around you for light-years away, or you are between two objects with equal gravitational forces that cancel each other out. ◦Apparent weightlessness: this is what "weightlessness" really means when we see astronauts orbiting in space. The astronauts are falling toward the earth due to gravitational forces (weight), but they are falling at the same rate as their shuttle, so it appears that they are "weightless" inside the shuttle. It also occurs when people are in free-fall. An object will appear weightless when it is freely falling under the influence of gravity. The idea is that if the object were placed on a scale, which is also freely falling, then the scale will register no weight. The phenomenon of "weightlessness" occurs when there is no force of support on your body. When your body is effectively in "free fall", accelerating downward at the acceleration gravity, then you are not being supported. The sensation of apparent weight comes from the support that you feel from the floor, from the seat, etc. Different sensations of apparent weight can occur on a roller-coaster or in an aircraft because they can accelerate either upward or downward. |
|
|
|
What is momentum?
|
•Momentum = mv, where m is mass, v is velocity and the symbol for momentum is p.
Momentum is the power residing in a moving object. In an isolated system, momentum is always conserved. Momentum is a vector. |
|
|
|
What is impulse?
|
•Impulse = FΔt, where F is force and t is the time interval that the force acts.
•Impulse = average force from the change in momentum of colliding bodies: Ft = mΔv. When a force is applied to a rigid body it changes the momentum of that body. A small force applied for a long time can produce the same momentum change as a large force applied briefly, because it is the product of the force and the time for which it is applied that is important. Also, the same force can produce the same CHANGE in momentum of different objects, because what is variable is t. So if the same force were applied to a 5 kg ball moving at 9 m/s and a 7 kg ball moving at 7 m/s, even though their individual masses and velocities aren't the same, since the same force is applied to them, their change in momentum could be the same as long as the time for each is different. Change in momentum is proportional to the force and change in momentum is proportional to time. So if the same time was applied to 2 different objects, the change in momentum would be the same. The force used for impulse is the net force on an object. This net force can be frictional force. So if you are given an equation about an object that is moving at a certain initial velocity (like 30 m/s) on a pavement and stops in a certain amount of time (like 7s), and you need to figure out the coefficient of friction and you are not given the mass of the object or the distance, then instead of trying to solve the problem with W = change in KE, use Ft = mΔv. The beauty with this equation is that you don't need mass or distance! Why? Because the frictional force that you use F = μmg and the masses cancel out. Frictional force is F = μN, and the normal force here is mg. |
Impulse is the change in momentum or the force of a collision multiplied by the duration of the collision (FΔt).
|
|

What is Conservation of linear momentum?
|
◦Total momentum before = total momentum after.
◦Momentum is a vector, so be sure to assign one direction as positive and another as negative when adding individual momenta in calculating the total momentum. This holds true if you have 2 objects coming from different directions, one object is going to be + and one object is going to be -. This is important because it tells you what direction they will be after the collision and it also tells you what the total momentum is. If you have 2 objects with different directions of velocities that collide with each other and stick together, in order to figure out the final velocity after the collision, you have to break up their initial velocities into vertical and horizontal components. So you find the momentum of the vertical component of both objects before and after the collision, and you find the momentum of the horizontal components of both objects before and after. Then, with the final vertical velocity and the final horizontal velocity, you use the pythagoreas theorem to calculate the final velocity. Make sure to assign the correct directions to them when you break up the components. ◦Total momentum of 2 objects before a collision = total momentum of 2 objects after a collision. If you have a bunch of colliding objects, will their velocity, momentum, and kinetic energy remain constant before, during, and after both an inelastic and elastic collision? Well, of course we would say no for kinetic energy and velocity - Each of the colliding objects by itself is NOT an isolated system, and each of their velocities will change when they experience the force of the collision, and thus acceleration. Acceleration means to change velocity. Momentum is conserved for an isolated system, so the sum of the momentums of the colliding objects will remain constant, but their individual momentums will change. |
|
|
What are Elastic collisions?
|
◦Perfectly elastic collisions: conservation of both momentum and kinetic energy.
◦Conservation of kinetic energy: total kinetic energy before = total kinetic energy after. ◦Kinetic energy is scalar, so there are no positive / negative signs to worry about. What is not true concerning elastic collisions is that the speed of all colliding objects do not always remain unchanged. Even though the kinetic energy is conserved, and KE = 1/2 mv^2, the speed can change before and after the objects collide. For example, when one pool ball elastically collides with a second at rest, the first stops while the second continues at the original velocity of the first. All that is conserved is KE - how the velocity plays out remains to be calculated. Only conservative forces are involved in elastic collisions. Since KE is conserved, then the KE could be converted back to PE, which could mean that if the object was dropped or thrown from a height, it could return back to the same height. When an object collides with another object, causing that object to move, then it does work on the object. So even with elastic collisions, and even though KE is conserved, as long as the objects are moving, work is being done on them. The objects that move individually have a change in KE, and that change in KE is the work done on each object, but the total KE of the system is the same before and after the collision (it's conserved). Realize that speed and velocity are different if the objects are of different masses and could collide and move in different directions after the collision. Just because it's an elastic collision and KE and momentum are conserved doesn't mean they will go in the same direction - one object may have a huge mass, so the other object may bounce back. In this case, if the question asks for speed, use KE to calculate the speed before and after because KE is scalar and speed is scalar. If the question asks for velocity, use momentum to calculate the velocity before and after because momemtum is a vector and velocity is a vector. |
Elastic collisions are collisions where the mechanical energy is conserved. In an elastic collision, no energy is dissipated to internal energy.
Ui + Ki = Uf + Kf where the sum of the mechanical energies before the collision is equal to the sum of the mechanical energies after the collision. |
|

What are inelastic collisions?
|
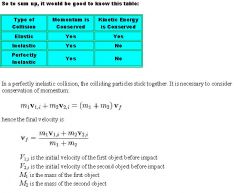
◦Conservation of momentum only. ◦Kinetic energy is lost during an inelastic collision due to heat or other non-conservative force. ◦Collisions in everyday life are inelastic to varying extents. ◦When things stick together after a collision, it is said to be a Perfectly inelastic collision. But many inelastic collisions just involve objects who have the same equal and opposite or the same velocities (from momentum), but lower speeds (from kinetic energy). The equation for inelastic collisions is: m1v1 + m2v2 = (m1+m2)*vfinal. The final velocity of the stuck together masses (m1 and m2) is vfinal. v1 and v2 are the initial velocities of the masses. With ELASTIC collisions, note this question: With one mass AT REST, as the mass of the incoming mass increases, how do the final velocities of each mass relate to the initial velocity of the incoming mass? Answer : As the incoming mass gets bigger .. it's velocity stays the same as the initial velocity that it had, and the other mass's velocity will start to approach twice the initial velocity of the incoming mass! Also, say you have an object m2 with a mass three times greater than m1, and m2 is at rest and m1 strikes m2, what is the velocity of m2 in an elastic collision? Well, first know that m1 has a smaller mass than m2, so it will bounce in the opposite direction. Because of this, it's final momentum is going to be negative. The m2 will have a positive momentum. So when figuring out the velocity of m2, know that whatever the velocity is, it has to create a momentum that is greater than the initial momentum of m1, because the final momentum of m2 and final momentum of m1 (which is negative) have to equal the initial momentum of m1. Once again, it's not the individual momentums that are conserved (and KE for elastic collisions), but the sum of the momentums and KEs.
|
For inelastic collisions, initial momentum is equal to final momentum.
The initial momentum of an isolated system equals the final momenturn of an isolated system. However, because momentum is a vector, we must pay close attention to its direction. In a 2 dimensional system, if we have momentum in both the x and y directions, one equation is required for each direction. |
|
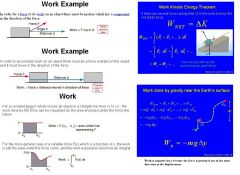
What is work and the Derived units, sign conventions?
|
Work is the amount of energy transferred by a force acting through a distance. Like energy, it is a scalar quantity. Work is greatest in size when the force is in the same direction as the distance that the object travels. Don't forget that F is the NET force on an object, so if there are multiple forces on an object, calculate the NET force and use that to find the work.
•W = Fdcosθ. •F is force, d is the distance over which the force is applied, and θ is the angle between the force and distance. This equation applies for all forces except friction. The force may be one of many forces acting on thc system or it may be the net force. It is the energy transferred into a system due to a force. If the resultant force F on an object acts while the object is displaced a distance d, and the force and displacement act parallel to each other, the mechanical work done on the object is the product of F multiplied by d. ◦Work is energy, and the unit is the Joule. ◦Joule = N·m = kg·m/s^2·m = kg·m^2/s^2 Notice that W = Fdcosθ only works with cosθ when there is an angle between the force and the distance, if there is no angle between the force and distance (meaning the force acts in the same direction as the distance) than W = Fd. The force could be down the incline (with the object moving the same direction as the force of gravity, with no other applied forces), so the F = mgsinθ. This force would be multiplied by d to get work. Work done by an external force like friction is equal to the change in mechanical energy (because this energy that leaves is what makes frictional forces non-conservative - it's mechanical energy lost). |
There are only two types of energy transfer: work and heat. Work (W) is the transfer of energy via a force. Heat is the transfer of energy by natural flow from a warmer body to a colder body. Thus all work is energy transfer, but all energy transfer is not work (because it could be heat too). By 'transfer', we mean transfer from the system to the surroundings or vice versa. Therefore, the amount of work done will depend upon what we choose for our system. Frictional forces are an exception because frictional forces change internal energy as well as mechanical energy. (Internal energy is the energy of individual molecules). If the total energy transfer is due to forces and none to heat, the work done on an object is also given by: W = ΔK + ΔU + ΔEi. This is how frictional forces can change the internal energy. If there is neither heat nor friction: W = ΔK + ΔU, where internal energy is not changed. K is kinetic energy, U is potential energy and Ei is internal energy.
|
|

What is Rotational equilibrium (Sum of Torque = 0)?
|

•When things are at rotational equilibrium, there the sum of all torques = 0.
•Conventionally, positive torques act counterclockwise, negative torques act clockwise. •When things are at rotational equilibrium, they either don't rotate OR they rotate at a constant rate (constant angular velocity or angular velocity). This is similar to translational equilibrium. •You cannot have rotational equilibrium if there is angular acceleration. •Deceleration is acceleration in the opposite direction. •At rotational equilibrium: ◦Equal weights on a balance. ◦Propeller spinning at a fixed frequency. ◦Asteroid rotating at a constant pace as it drifts in space. •NOT at rotational equilibrium: ◦Unequal weights in a balance such that the balance is begins to tilt. ◦Propeller spinning faster and faster. ◦Propeller slowing down. |
|
|
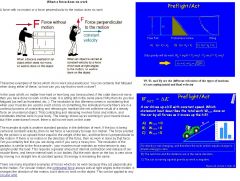
Explain the fact that Amount of work done in gravitational field is path-independent.
|

◦Unlike friction, gravity always acts downwards. The gravitational force is path-independent. Thus, force perpendicular to the gravitational force involves no work. The force exerted by the person is an upward force equal to the weight of the box, and that force is perpendicular to the motion. Since the force exerted on the object is up and down, but is not in the direction of the motion (which is to the right or left), the work is 0. Put it another way, W = Fdcosθ, but here cosθ = cos90 = 0. Pushing an object at constant speed up a frictionless inclined plane involves the same amount of work as directly lifting the same object to the same height at constant speed. ◦Sliding down a frictionless inclined plane involves the same gravitational work as doing a free fall at the same height. As long as the distances are equal, the work is equal. Why? Because work done BY GRAVITY is always the same: W = mgh. It doesn't matter how it goes down, down a frictionless slide, free fall, swing, whatever, if we are calculating work done BY GRAVITY, then W = mgh. Also, with the same example, if we have three objects with the same mass that slides down a frictionless incline, does a free fall, swings, etc from the same height and move down the same vertical distance, these same objects have the same amount of net work done on it by gravity and they have the same velocity at the bottom of the path because their work equals the change in KE, which is 1/2mv^2 and because their mass is the same, their velocity is the same. Now, usually, questions ask about work done ON AN OBJECT - and that's a different story. Work done on an object is W = Fdcosθ. Work done on an object could mean there are different forces added. If the only force acting on the object is gravity, then the work done would be by the gravity force. However, the difference between W = mgh and W = Fdcosθ is h and d. H is used if we know the height of the incline. D is used if we know the length of the incline. The significance of work done by gravity is that it is from a certain HEIGHT, not LENGTH.
|
Work due to gravity is W = mgh. Work due to friction force is W = (Force of friction)(distance that the object travels). The distance that the object travels is not height, like with gravity, it is the length.
|
|
|
What is the Mechanical advantage?
|
◦Mechanical advantage = little input force (effort) -> large output force.
◦Using the lever arm can achieve mechanical advantage. ◦Using pulleys can achieve mechanical advantage. An ideal machine changes force, never work. A real machine reduces force. However, in a real machine some energy is lost to internal energy through friction, and thus more work is required for the same job. A short-cut to figuring out mechanical advantage problems is that, if the machine is an ideal machine, work doesn't change, so use the formula W = Fd. If you know the force doubles by 2, then the distance has to decrease by 2. You don't have to figure out the actual forces, just use the ratios. (Note that the terms mechanical advantage and force ratio apply to machines in general, so we could speak of the mechanical advantage of pulley systems, levers, etc..) By conservation of energy, a mechanical advantage which multiplies force is paid for in distance. When the small piston above moves downward 1 meter, the large piston will be raised only 1/4 meter. So the greater the force, the smaller the distance that the object is moved. |
|
|
What is the difference between internal energy and mechanical energy?
|

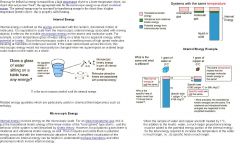
Internal energy is energy on a microscopic scale while mechanical energy is energy on a macroscopic scale. Internal energy is how objects have heat (and can increase from friction, etc) and it is also associated with the random movements of the ATOMS contained within molecules (translational, rotational, vibrational). The internal energy of these molecules and atoms are also composed of potential and kinetic energies. If an object slides down an incline (with friction), the work done on the object is equal to the sum of the changes in kinetic energy (the part of mechanical energy that's macroscopic) and the internal energies (microscopic energies). Work in general is equal to the change in kinetic energy (Work-energy theorem). The internal energy of a substance is composed of not only the kinetic energy partitions; there can also be internal energy in chemical potential energy, nuclear energy, etc.; temperature does not directly measure these energy forms, so it is does not have a direct relationship to internal energy of a substance.
|
|
|
What is the Work–energy theorem?
|

Net work done by forces on a particle causes a change in the kinetic energy of the particle.◦Work on an object can transform into kinetic energy. A force pushing over some distance will change the kinetic energy. If there is no change in velocity (since that is where the change in kinetic energy comes from generally), then there is no net work. So that means if an object is travelling at constant velocity, there is no net work on the object. ■When you are pushing on an object, it will move: F*d = ½mv^2 .■When gravity does work on an object, it will move: Fweight*h = mgh = ½mv^2. Kinetic energy of an object can do work. ■A moving object can slide up an inclined plane before coming to a stop: ½mv^2 = mgh .■A moving object can slide against friction for a while before coming to a stop: ½mv^2 = Ffriction *d. If there are several forces, then W is the work done by net (total) force and you can add up the work done by each force. The amount of work equals the change in kinetic energy,
and kinetic energy varies with the square of the speed. Changes in the magnitude of velocity require more work at higher magnitudes. Another way to think about it is to remember that work requires the force operating over a distance while a change in velocity requires an acceleration (a force) over a certain duration of time. Because at higher speeds, an object will be covering more distance in a given amount of time, so more work is necessary. So it takes more work to accelerate something from 100m/s to 200m/s than 50m/s to 100m/s. |
The work-energy theorem is ONLY true when ALL energy transfer results only in a change to kinetic energy. In other words, it is a very limited case. Since work and heat are the only two types of energy transfer, when there is no heat, work must be responsible for any net energy change, and therefore must equal the sum of all energy changes. If there is no friction, all energy change is in the form of mechanical energy. Frictional forces and heat are two different things. Friction changes the internal energy, which could convert to heat, but don't think of it as heat.
|
|
What is power?
|
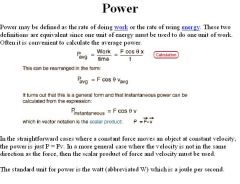
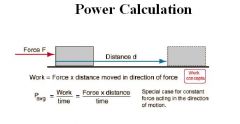
◦Power is the rate of work, or work over time: P = W/t
◦The unit for power is the Watt, or W (don't confuse this W with the shorthand of work). ◦Watt = Joule / second Power is also: P = Fv. Power is equal to Force multiplied by velocity. Why you ask? Because work is equal to Fd, and since power equals W/t = (Fd)/t, power is equal to Fv. The rate of doing work is equal to the rate of using energy since the a force transfers one unit of energy when it does one unit of work.This calculation is only for cases where the force is in the direction of the velocity, and there are many cases where that is not so. Then for instantaneous power, you just multiply the product of force and velocity by the cosine of the angle between them to get the power P = Fcos*theta *v. In the more general cases where everything varies, one often calculates the work first and then divides by the time to get the average power. A constant force that moves something at a constant velocity could be a frictional force. |
|
|

What is energy?
|

•Work and energy are interchangeable.
•All types of energy have the same unit - the Joule. |
|
|

What is kinetic energy?
|

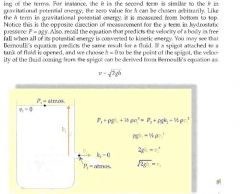
•Kinetic energy: KE = ½mv^2.◦Unit = Joule = kg·m^2/s^2. The kinetic energy of an object is the extra energy which it possesses due to its motion. It is defined as the work needed to accelerate a body of a given mass from rest to its current velocity. Having gained this energy during its acceleration, the body maintains this kinetic energy unless its speed changes. Negative work of the same magnitude would be required to return the body to a state of rest from that velocity. ◦At the same speed, the larger mass has the larger kinetic energy.◦When you double the mass, you double the kinetic energy. At the same mass, the higher speed has the larger kinetic energy. ◦When you double the speed, you quadruple the kinetic energy. ◦Speed is more important than mass for the kinetic energy because speed is squared. Anytime you see kinetic energy think "SPEED". Velocity is fine too. As speed increases, so does the amount of kinetic energy. However, because the equation has a velocity-squared term, the kinetic energy increase is exponential compared to the speed increase. For example, when the velocity or speed doubles, the kinetic energy quadruples, so even a small velocity increase results in a disproportionate increase in kinetic energy. Say you are told that gravity is the only force acting on an object and the potential energy of the object increases, what is the change in velocity. Since the potential energy increased, the kinetic energy decreased. However, kinetic energy is 1/2mv^2. So we would need to know either the initial or final velocity, because we would be calculating the change in kinetic energy - 1/2m*final velocity^2 - 1/2m*initial velocity^2. The principles of Kinetic energy and potential energy are not just for objects. It could be for any moving thing, like water. The energy of liquids remain the same (as long as temperature is constant). So if liquid moves from potential energy to kinetic energy (by it flowing as opposed to being held), you can equate mgh = 1/2mv^2. Also, liquid can behave like projectiles, so you can solve for projectiles in the same way. Time for projectiles in the horizontal and vertical components is the same.
|
|
|
|
What is potential energy for gravitation, local (PE = mgh)?
|
Gravitational potential energy is energy an object possesses because of its position in a gravitational field.
◦PE = mgh (gravitational, local) ■PE = mgh is local because it only works on the surface of the Earth. ■h is the distance from the Earth's surface. ■PE = mgh is derived from a more general formula ■On earth, g is 9.8 m/s^2. This constant is larger for larger planets and smaller for smaller planets. If you have an object on an incline, and the height of the incline increases, then the potential energy of the object increases, and that potential energy would translate into an increase in velocity, because mgh = 1/2mv^2. Potential energy would transfer into kinetic energy. |
|
|

What is potential energy for springs?
|

◦PE = 1/2kx^2 (spring). ■x is distance of the end of the spring from its equilibrium position. ■k is the spring constant.■Stiff springs have a larger k because they are harder to stretch (it takes more energy to stretch them). If you pull on a spring and stretch it, then you do work. That is because you are applying a force over a displacement. Since work is the transfer of energy, we must account for to what the energy was transferred. We say that the energy was transferred into the spring. The work becomes stored energy in the spring. The work becomes potential energy in the spring. A spring can be stretched or compressed. The force of a string (Hooke's Law) is F = -kx. X is the total distance that the string is shortened, it doesn't matter if force is applied to both ends of the string, the total distance that it is shortened is x. Both ends of the string would be shortened by half the total distance. Say for instance that you have an 8kg ball and a 2kg ball placed on the same spring at the same time and the spring is compressed and released. What is the maximum height of the balls? The balls will actually reach the same maximum height - which is different than if they were on separate springs. The balls leave the spring at the time, so they will have the same velocity. This velocity is what will dictate the maximum height. What we use is 1/2kx^2 = 1/2mv^2. Then you use 1/2mv^2 = mgh. The spring potential energy of the ball first gets converted into kinetic energy, then gets converted into gravitational potential energy as it regains height. If you pull on a spring and stretch it, then you do work. That is because you are applying a force over a displacement. Since work is the transfer of energy, we must account for to what the energy was transferred. We say that the energy was transferred into the spring. The work becomes stored energy in the spring. The work becomes potential energy in the spring. A spring can be stretched or compressed. The work done on the string to stretch it or to compress it becomes the potential energy in the spring. Because what happens is, the spring has a restoring force that puts it back into place. That force is a conservative force, it's not applied, it's just the energy transfered back to equilibrium. So a question wouldn't ask what the work done was on the string by the RESTORING force, it's asking about the work done to stretch the string or compress it.
|
|
|
|
What is the potential energy for gravitation, general?
|

◦PE = -GmM/r (gravitational, general).
■This is the general formula for gravitational potential energy. Because the potential energy is negative, the farther and farther the objects move away from each other (the bigger r gets), the more the potential energy nears zero and the gravitational force between them is infinetesimally small. When the radius between them gets smaller, the potential energy gets smaller, (more negative), and "falls into a well" of their binding energy, and that becomes the work that is necessary to separate them. So the potential energy only becomes more positive as it approaches zero and the distance between the objects gets larger. Or the potential energy becomes more negative and the distance between the objects gets smaller. If you wanted to move an object beyond the grip of the potential energy, then you would need to supply at least enough kinetic energy to match the magnitude of the potential energy. ■r is the distance between the center of the two attracting objects. We use this equation when the force of gravity varies too much and we cannot assume the acceleration due to gravity on the surface of the earth (9.8 m/s^2). The gravitational potential energy near a planet is then negative, since gravity does positive work as the mass approaches.The negative potential is indicative of a "bound state"; once a mass is near a large body, it is trapped until something can provide enough energy to allow it to escape. It is basically the stored potential energy that the mass has to escape. G is the universal gravitation constant - it is the same for everything. ■m and M are the mass of the two attracting objects. Acceleration is independent of the small object's mass when the acceleration is due to the the large object (like Earth). This is because the mass of the small object cancels out when you equate F = GMm/r^2 = ma. The m is the mass of the small object and it is found on both sides of the equation. |
|
|

What is the Conservation of energy ?
|

◦The total amount of energy before = the total amount of energy after.
◦Gravitational potential energy is converted to kinetic energy as an object falls, but the total amount of energy stays the same. ◦Kinetic energy is converted to heat and sound energy as a crate slides to a stop on a rough surface. Kinetic energy at the highest point of a projectile is not zero - only the vertical velocity (and acceleration and force) is zero. Even though kinetic energy is = 1/2 mv^2, the v that we use to find kinetic energy is the horizontal velocity - it stays the same throughout the whole trip of a projectile. Always try to solve a mechanics question first by using conservation of energy. |
A system is any defined area that we choose to consider separately from the rest of the universe. The rest of the universe is called the surroundings. Together, mass and energy define the three basic systems in physics: the open system, where
energy and mass are exchanged with the surroundings; the closed system, where energy is exchanged with the surroundings but mass is not: the isolated system, where neither energy nor mass is exchanged with the surroundings. By definition, although the form of energy in an isolated system may change, the energy of an isolated system is conserved. Thus the Law of Conservation of Energy states that, since the universe is an isolated system, the energy of the universe remains constant. Conservation of energy does NOT say that a certain type of energy (i.e.kinetic energy or potential) must be conserved, just that the SUM of all energy types must remain constant in an ISOLATED system. In a closed system, the change in the sum of all energy types must equal the energy leaving or entering the system. Energy can enter or leave a closed system only as work or heat. |
|
|
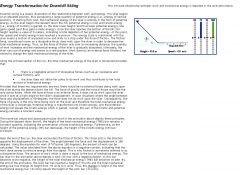
What is the Conservative forces?
|

◦If a force doesn't dissipate heat, sound or light, then it is a conservative force. ◦Work done by conservative forces are path independent. ◦Each type of conservative force can be transformed into a change in potential energy. For example, the force from a spring can be stored as spring potential energy. Conservative Forces are reversible forces, meaning that the work done by a conservative force is recoverable, i.e. you can get out any work you put in and vise versa.◦Gravitational force can be stored as gravitational potential energy. ◦Electromagnetic forces are also conservative. Local and general gravity and pressure are conservative forces. Because conservative forces don't dissipate heat, they can't change the temperature of objects. Mechanical energy is conserved with conservative forces leaving no room for a temperature change. Conservative forces conserve mechanical energy, but they can redistribute energy among other forms of mechanical energy. That is why non-conservative forces change the temperature of objects- energy is not conserved and is released in the form of heat. When only conservative forces are acting, the sum of the change in mechanical energy (KE + PE) is zero - there is no change in mechanical energy. External forces include the applied force, normal force, tension force, friction force, and air resistance force. And for our purposes, the internal forces include the gravity forces, magnetic force, electrical force, and spring force. Whenever work is done upon an object by an external force, there will be a change in the total mechanical energy of the object. If only internal forces are doing work (no work done by external forces), there is no change in total mechanical energy; the total mechanical energy is said to be conserved. So when solving problems, if there is an external force (non-conservative force) - work is equal to change in mechanical energy (KE and PE). It's the work done on the object and it can be positive work (where the object is gaining mechanical energy) or negative work (where the object is losing mechanical energy). If there are only internal forces working, Work = change in kinetic energy, because it's the energy that causes the object to move and do work. Potential energy is just the stored energy that an object has because of it's position.
|
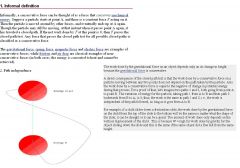
It is a necessary but not a sufficient condition that conservative forces be functions of position only. In other words, the strength of a conservative force is dependent solely upon its position. For instance, the conservative force of gravity upon an object
is dependent upon its position within a gravitational field; the conservative Hooke's law force is dependent upon the position of the spring or object creating it. Conservative forces have potential energies associated with them. Conservative forces do not change the mechanical energy of a system. Thus the Law of Conservation of Mechanical Energy states that when only conservative forces are acting, the sum of the mechanical energies remains constant: Ki + Ui = Kf + Uf or 0 = ΔK + ΔU The work done against conservative forces is conserved in potential energy; the work done against nonconservative forces is not conserved. Since mechanical energy is conserved with conservative forces, the net work done is zero |
|
|
What is power and the units for power?
|
◦Power is the rate of energy use: P = W/t. W means work, t means time. It is energy divided by time. Power is also equal to velocity times force: P = Fv.
◦The unit for power is the Watt, or Joule per second. ◦Lifting a crate in one minute requires more power than lifting the same crate in an hour. Power depends on work - if there is no work done on the object, then power is zero. For instance, if you hold an object in the air for a certain amount of time, but there is no change in distance of the object, then work = 0, and so power is 0. If you move an object from one height to an identical height, there is no work because the motion is perpendicular to the force of gravity - the movement from one height to the other, same height involves only a horizontal movement, which is is perpendicular to the force of gravity of the object and the normal force of the object. A force perpendicular to the motion does no work, so no power is done. |
Electrical power is the same quality as mechanical power, just as electric energy is the same quality as mechanical energy. In other words, power is power regardless of what source produced it.
|
|
|
What is amplitude and period?
|
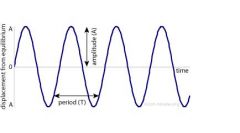
◦Amplitude (A): how high the peaks are or how low the troughs are, in meters.
■The displacement is how far the wave vibrates / oscillates about its equilibrium (center) position. ■The amplitude is the maximum displacement. ■Amplitude is correlated with the total energy of the system in periodic motion. Larger amplitude = greater energy. ◦Period (T): the time it takes to complete one cycle. The unit of period is seconds. ■T = 1/f. The period is the duration of one cycle in a repeating event, so the period is the reciprocal of the frequency. Period = seconds/cycle When looking at waveforms on a graph, the period may not seem as obvious if it's not a sinusoidal graph (y = Asin(wt)). However, just look to see when the waveform starts to repeat itself on a displacement (y) versus time (x) curve. When the waveform starts to repeat itself, that is when it has completed one full cycle and the time that it starts to repeat itself is the time it took to complete one cycle. The less defined wave forms are usually the result of interference from waveforms of a number of frequencies. If you are given a problem that says that the range of amplitudes for two waves is between 4 and 12, that means that possible wave units could be 8 and 4 - maximum destructive interference could occur at 8-4 = 4 units and maximum constructive interference could occur at 8+4 = 12 units. |
Frequency is related to both wavelength and period by inverse relationships. There is no direct mathematical relationship between amplitude and frequency.
|
|
|
What is frequency and angular frequency?
|
◦Frequency (f): the rate, or how many cycles per second, in Hertz which means cycles per second.
■f = 1/T. Frequency is the number of occurrences of a repeating event per unit time. ■Sometimes, frequency is in rpm (revolutions per minute). rpm = cycles per second x 60. ◦Angular frequency (w): the rate, in how many radians per second. ■w = 2πf which is radians/sec. ■w is also called angular velocity. w is also equal to the square root of k/m, where k is the constant of Hooke's law, and m is mass in kg. This equation helps you to know what the frequency of something is that is vibrating, such as when you pull an object on a string that vibrates back and forth. k measures how stiff an object is, so that stiffness affects how frequently it vibrates. |
Frequency of a wave is the number of wavelengths that pass a fixed point in one second. Hertz is written as 1/s. The period is the number of seconds required for one wavelength to pass a fixed point. When the x-axis is time, the period is from any point on the wave function, to the next point where the function begins to repeat itself.
|
|
|
What is phase?
|
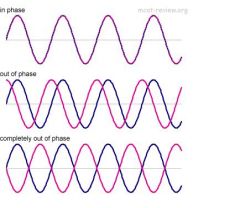
◦In phase: the waves are 0 or 2π radians (0 or 360°) apart. The resulting amplitude (sum of the waves) is twice the original. Two waves are "in phase" if the peaks of one wave align with the peaks of the other. ◦Completely out of phase: the waves are π radians (180°) apart. The resulting amplitude is zero. ◦Out of phase: resulting amplitude is between 0 and twice the original. Two waves are "out of phase" if the peaks of one wave align with the troughs of the other.
Think of phase as a horizontal shift of a wave on a Cartesian graph. Each wavelength represents 360°. So half a wavelength represents 180°. Two waves that are the same wavelength, and begin at the same point, are said to be in phase with each other. Two waves that are the same wavelength but travel different distances to arrive at the same point, will be out of phase if that distance is not some multiple of the wavelength. The angle by which two waves differ is called their phase constant. |
A wavelength is represented as the distance from a crest to a crest or the distance of a trough to a trough. If you are given the distance of a crest to a trough, that is half the wavelength. Multiply that distance by 2 to get the wavelength.
|
|
|
What is Hooke’s law?
|

Hooke's law is the relationship between the force exerted on the mass and its position x. Consider a object with mass m, that is on a frictionless surface and is attached to a spring with spring constant k. The force the spring exerts on the mass depends on how much the spring is stretched or compressed, and so this force is a function of the mass's position. Any object that is initially displaced slightly from a stable equilibrium point will oscillate about its equilibrium position. It will, in general, experience a restoring force that depends on the displacement x from equilibrium. There is a negative sign on the right hand side of the equation because the restoring force always acts in the opposite direction of the displacement (for example, when a spring is stretched to the left, it pulls back to the right).Force: F= -kx. F is the force that acts to restore the spring back to its equilibrium position, or restoring force. k is the spring constant. Stiffer springs have a higher k value. x is the displacement. The amplitude (A) is the maximum x value. The displacement can be in x or y axis and is denoted as x. If an object is compressed from its rest position, what will happen after the mass is released but before the mass reaches its relaxed position? The velocity will continually increase, but the acceleration will decrease. Why? The net force is F = kx in the direction of motion (which is toward the relaxed position). X will continue to decrease, because the object is reaching its relaxed position (x is the distance it is compressed), so the force is decreasing, so the acceleration is decreasing. However, the velocity will increase because velocity is displacement over time, and the distance that the object moves to the relaxed position increases over time.
|
|
|

What is Simple harmonic motion; displacement as a sinusoidal function of time?
|

The motion is periodic: the body oscillates about an equilibrium position in a sinusoidal pattern in the vertical motion. Each oscillation is identical, and thus the period, frequency, and amplitude of the motion are constant. y = A·sin(ωt). y is displacement (y-axis). For transverse waves, the y-axis gives the transverse displacement, the displacement of the medium perpendicular to the direction of propagation. For longitudinal waves, the y axis may either be pressure or displacement of the medium parallel to the direction of propagation. The x-axis is time. A is amplitude. ω is angular frequency in radians (also called angular velocity). t is time. Examples of simple harmonic motion: Oscillating spring, Pendulum, and Things going around a circle at constant speed (If we consider just the y-component of the motion the path with time we can see that it traces out a wave). Simple harmonic motion can in some cases be considered to be the one-dimensional projection of uniform circular motion. If an object moves with angular velocity ω around a circle of radius r centered at the origin of the x-y plane, then its motion along each coordinate is simple harmonic motion with amplitude r and angular frequency ω.
Simple harmonic motion means that it is a sinusoidal function in time. |
Two important properties of simple harmonic motion: The acceleration is directly proportional to the displacement, but opposite in sign, and the acceleration and displacement are related by the square of the frequency. Harmonic motion is motion that is repeated over and over again.
|
|

What is Motion of a pendulum?
|
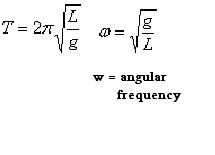
A pendulum consists of a weight suspended on a rod, string or wire. When the weight or bob is moved and let go, the pendulum will swing back and forth in a periodic motion like simple harmonic motion. The affect of gravity on the bob results in the periodic motion and its length determines the frequency of its swing. Inertia will cause it to continue to move back and forth at a definite rate. T is period, L is the length of the string, and g is 9.8. w is the angular frequency. The frequency of the pendulum is how many times it goes back and forth per second. The period of the pendulum is how long it takes for it to go back and forth one time. If f denotes the frequency, then the period is T = 1/f.
|
|
|
|
What is General periodic motion in regards to PE and KE?
|
◦At the equilibrium position, PE = 0, KE = maximum.
◦At the maximum displacement (amplitude) x = A, PE = maximum, KE = 0. At any point, PE + KE = maximum PE = maximum KE = constant. This is because PE + KE = E of the system at every point. Constant = PEmax equations: 1)½kA^2 for a spring and 2) mgA for a pendulum, where A is the maximum height that the pendulum can gain during a swing. For maximum KE at the equilibrium position, use: Constant = KEmax = ½mv^2. If you are given the velocity at the equilibrium position, then you should be able to find out the amplitude by setting maximum KE = maximum PE. If you are given the amplitude, then you should be able to find out the velocity at the equilibrium position by setting maximum PE = maximum KE. |
|
|
|
What is the relationship between Wavelength, frequency and wave speed (velocity)?
|
◦v = fλ
◦v is velocity, f is frequency, and λ is wavelength. ◦Some times, frequency is also written as ν. ◦Wavelength is in meters, frequency is in Hertz and velocity is in meters per second. Wavelength is how many meters per cycle, while frequency is cycles per second. The period is seconds per cycle. Wave velocity is a constant in a nondispersive medium; it is independent of frequency, wavelength, and amplitude. So, since the velocity of the wave on a string is a function of the properties of the string, it will remain constant. If the length of the string is constant, then the wavelength of the standing wave is constant. If the velocity and wavelength are constant, then frequency is constant too. Velocity of a wave is independent of the wavelength and frequency and dependent on the medium. So changing the frequency won't change the velocity of a wave, but will change its wavelength. |
Velocity is dictated by the medium. Two aspects of the medium affect the velocity: 1) the medium's resistance to change in shape (elasticity) and 2) the medium's resistance to change in motion (or inertia).
Velocity for a gas increases with temperature. Velocity is constant for any given medium. |
|
|
What is the difference between mechanical waves and electromagnetic waves?
|
Another way to categorize waves is on the basis of their ability or inability to transmit energy through a vacuum (i.e., empty space). Categorizing waves on this basis leads to two notable categories: electromagnetic waves and mechanical waves. An electromagnetic wave is a wave which is capable of transmitting its energy through a vacuum (i.e., empty space). Electromagnetic waves are produced by the vibration of charged particles. Electromagnetic waves which are produced on the sun subsequently travel to Earth through the vacuum of outer space. Were it not for the ability of electromagnetic waves to travel to through a vacuum, there would undoubtedly be no life on Earth. All light waves are examples of electromagnetic waves. A mechanical wave is a wave which is not capable of transmitting its energy through a vacuum. Mechanical waves require a medium in order to transport their energy from one location to another. A sound wave is an example of a mechanical wave. Sound waves are incapable of traveling through a vacuum. Slinky waves, water waves, stadium waves, and jump rope waves are other examples of mechanical waves; each requires some medium in order to exist. A slinky wave requires the coils of the slinky; a water wave requires water; a stadium wave requires fans in a stadium; and a jump rope wave requires a jump rope. Mechanical waves, like sound waves and waver waves, are a local oscillation of material. Only the energy propagates; the oscillating material does not move far from its initial equilibrium position; the wave travels by jumping from one particle of the medium to another. Therefore, mechanical waves transport energy and not material. A mechanical wave requires an initial energy input to be created. Once this initial energy is added, the wave will travel through the medium until all the energy has been transferred. So electromagnetic waves and mechanical waves both only transport energy, just electromagnetic waves do not need a medium to travel in while mechanical waves do. A wave is a disturbance that travels through a medium, transporting ONLY ENERGY from one locatino to another location.
|
A wave is a transfer of momentum and energy from one point to another. Mechanical waves require some medium through which to travel. The medium, if it is perfectly elastic, is momentarily displaced by a wave and then returned to its original position. Such a medium is called nondispersive because a wave maintains its shape and does not disperse as it travels. Nondispersive waves can be considered ideal waves - assume all media to be nondispersive unless otherwise indicated. Electromagnetic waves are transverse waves.
|
|

What is Amplitude and intensity?
|
◦Amplitude is correlated with the energy of the wave. Greater amplitude = greater energy of the wave. ◦Intensity = energy per area per time = power per area. Units: W/(m^2). As a general rule the larger the amplitude, the greater the intensity, the louder the sound. Sound waves with large amplitudes are said to be "loud". Sound waves with small amplitudes are said to be "quiet" or "soft". intensity is related to the density of the medium and the speed, frequency, and amplitude of the wave. The square of the amplitude is proportional to the intensity of the wave.Thus, amplitude and intensity are correlated. Greater amplitude leads to higher intensity. Special note on electromagnetic waves: amplitude and intensity increases the overall energy of electromagnetic waves such as light. However, neither amplitude nor intensity changes the energy per photon. Energy per photon depends on wavelength and frequency. The shorter the wavelength (also the higher the frequency), the greater the energy. Intensity is the energy propagation through space. The intensity of a light ray decreases when it passes through another medium other than air (like that experienced from refraction demonstrated by Snell's law) and it's velocity decreases in the medium and this leads to an overall loss of energy because KE = 1/2mv^2. I = P/A and the units are W/(m^2). If you need to know the surface area of a sphere, it is 4πr^2.
|
Know that intensity increases with the square of the amplitude and the square of the frequency for all waves.
|
|
|
What is Supposition of waves, interference, and addition ?
|
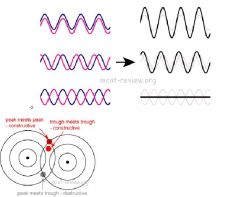
◦When waves superimpose on each other, they interfere.
◦Interference results from the addition of waves. ◦When in phase waves add, the resulting wave has a greater amplitude. ◦When out of phase waves add, the resulting wave has a smaller amplitude. ◦Constructive interference: addition of waves resulting in greater amplitude. ◦Destructive interference: addition (cancellation) of waves resulting in diminished amplitude. Two or more waves can occupy the same space. When this happens, if the waves are transverse, their displacements add at each point along the wave to form a new wave. This superposition of waves is called interference. After passing through each other, waves that interfere will revert to their original shape, unaffected by the interference. Any waveform, no matter how irregular, can be created by superposition of a sufficient number of sine waves with the correct amplitudes and wavelengths. |
The definition of interference is when the displacements (amplitudes) of two superimposed waves are summed along the wave.
|
|
|
What is resonance?
|

Resonance is the tendency of a system (usually a linear system) to oscillate at larger amplitude at some frequencies than at others. These are known as the system's resonant frequencies (or resonance frequencies). At these frequencies, even small periodic driving forces can produce large amplitude oscillations. The diagram shows examples of standing waves and the resonance frequencies that produce them. Frequencies can be obtained by f = v/λ
|
|
|

What are Standing waves (nodes, antinodes)?
|
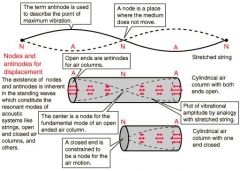
◦Standing waves vibrate at resonance frequencies.
◦Standing waves do not propagate like other waves (that's why they're called standing waves, they are not traveling waves. They are bound in place.). ◦Node: point where there's no oscillation. ◦Antinode: point where there's maximum oscillation - it's anti the node (it's anti the max oscillation). Electrons are an example of standing waves, because they vibrate in place. The spacing between nodes in a standing-wave pattern is λ/2. A half wavelength has a node at each end, so the spacing between nodes is λ/2. You can also find the λ of a closed standing wave as λ = 2L/n. But in general, there is only a half of a wavelength between 2 adjacent nodes. |
Standing waves (if they are not held by a string), are created by 2 sine traveling waves with equal amplitude, frequency and wavelength that are traveling in opposite directions.
|
|
|
What is refraction?
|
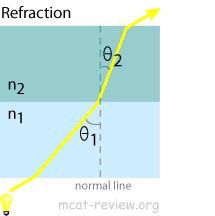
◦Refraction is the bending of waves when it meets a boundary between one medium to another. When light moves to a denser medium (higher refractive index), it bends toward the normal. Dispersion, the bending of light through a prism, is a special case of refraction that separates the colors of light into a rainbow because the glass bends the light twice and the separated colors are more easily seen. Drops of water can refract and disperse light like a prism and cause a rainbow. Refraction is the change in direction of a wave due to a change in its speed. This is most commonly observed when a wave passes from one medium to another at an angle. Refraction of light is the most commonly observed phenomenon, but any type of wave can refract when it interacts with a medium, for example when sound waves pass from one medium into another or when water waves move into water of a different depth. Refraction is described by Snell's law.
|
It might be good to remember that the index of refraction for liquid water is 1.3 and for glass is 1.5.
|
|
|
What is diffraction?
|
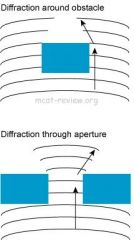
◦Diffraction is the spreading (diffusion) of waves around edges of apertures and obstacles. You can hear sounds from the other side of a building because sound spreads. Shining light through a hole will not produce a dot of light, instead, it is a diffuse circle. Diffraction is the basis for the single and double slit interference experiments with light. When you think of diffraction, think "diffuse". Diffraction refers to various phenomena which occur when a wave encounters an obstacle. It is described as the apparent bending of waves around small obstacles and the spreading out of waves past small openings. The smaller the opening and larger the wavelength (like with red light), the greater the bending of the wave. The smaller the hole, the greater the spreading of the light.
|
|
|
|
What is the production of sound?
|
•Sound is produced by vibrations in a medium.
•Sound can not be produced in a vacuum, nor can sound travel across a vacuum. •Vibrations whose frequency is too low to hear is called infrasound. •Vibrations whose frequency too high to hear is called ultrasound. •Vibrations produce pressure waves that oscilate parallel to the direction of propagation. Sound is transmitted through gases and liquids as longitudinal waves. Through solids, however, it can be transmitted as both longitudinal waves and transverse waves. Pressure can also be graphed as a type of standing wave. A particle in the middle of a high pressure area (where the amplitude is). Where the pressure is at a peak or trough, the displacement of the wave is at a node of a sound wave. So when you know there is a node (aka displacement node) of a sound wave, that is where the pressure is at a peak or trough. It's a displacement node because the particles that are located at that node cannot move. So, think about particles that are in an area of high pressure and low pressure. The particles in those areas cannot move because they have pressure pushing against them from both sides. That is the displacement node, they are stuck there (the node). That is also where the pressure is the highest or lowest (a pressure antinode). When standing waves have an antinode, that is where the pressure has a node. Think of blowing into a bottle when thinking of closed and open tubes. If it's closed on one side, or open on both sides, then you blow into one end of it that is open. The nodes and antinodes still form the same way and sound is still produced. |
|
|

What is Relative speed of sound in solids, liquids and gases?
|

The speed of sound is 331 m/s.
The speed of sound is the rate of travel of a sound wave through an elastic medium. Elasticity is the physical property of a material that returns to its original shape after the stress (e.g. external forces) that made it deform is removed. The relative amount of deformation is called the strain. Speed of sound in solids > liquids > gases. The reason why sound travels the fastest in solids is because solids is the most stiff. With all else being equal: 1) Speed of sound in stiff objects > elastic objects. 2) Speed of sound in less dense objects > more dense objects. Even though gases are less dense than solids, sound still travels slower in them because they are too elastic. 3) Speed of sound in hot objects > cold objects. Molecules at higher temperatures have more energy, thus they can vibrate faster. Since the molecules vibrate faster, sound waves can travel more quickly. The speed of sound depends on two factors: resistance to compression (stiffness) and density. Higher resistance to compression (an object that is stiff as opposed to elastic) leads to a faster transmission of sound, whereas a higher density will lead to a slower transmission of sound. Sound travels slower in denser material because it's "heavy" - it takes longer for the wave to reach the other side. Sound travels faster in stiffer objects because it by it being stiff, it doesn't strain as much when the sound travels through it. If the object was deformed by a greater amount (if the strain big), then the speed of the sound would travel slower. The wave of the sound is trying to move on to the next particle, so the more it gets hung up, the slower it travels. |
Heavier mediums tend to slow waves down, while stiffer mediums to speed waves up. Since a wave must move through the medium in order to pass through it, the inertia of the medium (its resistance to motion) tends to slow it down (density is mass/volume). On the other hand, the greater the elasticity of the medium, the faster it snaps back to position moving the wave along. The elastic component store potential energy, which gets converted into kinetic energy; the inertial component stores kinetic energy, which slows the wave down. The velocity of sound waves in a gas is limited by the average speed of the molecules within that gas. Thus, sound waves move more quickly though hot gases than through cold gases.
|
|

What is Intensity of sound (decibel units, log scale)?
|

The standard threshold of hearing intensity is Inought (I0) Inought is 10^-12 W/m^2
•Intensity is power per area, or the rate of energy expenditure per area. The unit is W/m^2. Power is from the sound. •The decibel system is based on human perception. The decibel value for sound with an intensity of Inought is zero - below this intensity, sound is not audible. As intensity increases, our perception of its loudness only increases to a much lesser degree. Although intensity for sound waves is a measure of energy rate transfer per area, humans do not perceive intensity on a linear scale. In order to compensate for this, an artificial scale for intensity level Beta has been created based upon a logarithmic scale of intensities, and it's unit is decibels (dB). The scale gives the relationship between Beta and Intensity. |
|
|
|
What is Attenuation?
|

•Sound attenuation is the gradual loss of intensity as sound travels through a medium. It is the process by which the intensity of sound is diminished by the conversion of the energy of the sound wave into heat. Sound attenuation is the greatest for soft, elastic, viscous, less dense material. Large sound attenuation means that a lot of sound is absorbed, versus small sound attenuation, which means a little sound is absorbed. Viscosity is a measure of the resistance of a fluid which is being deformed by stress. In everyday terms (and for fluids only), viscosity is "thickness". Thus, water is "thin", having a lower viscosity, while honey is "thick", having a higher viscosity. Viscosity describes a fluid's internal resistance to flow and may be thought of as a measure of fluid friction.
|
|
|
|
What is pitch?
|
•Pitch is the human perception of the frequency of sound.
•Higher frequency = higher pitch. |
|
|
|
What are harmonics?
|

•The fundamental frequency is called the first harmonic (n = 1). The next-up frequency is called the second harmonic (1st overtone) (n = 2). Harmonics are not overtones, when it comes to counting. Even numbered harmonics are odd numbered overtones and vice versa. A harmonic of a wave is a component frequency of the signal that is an integer multiple of the fundamental frequency. For example, if the fundamental frequency is f, the harmonics have frequencies f, 2f, 3f, 4f, . . . etc. The harmonics have the property that they are all periodic at the fundamental frequency, therefore the sum of harmonics is also periodic at that frequency. Harmonic frequencies are equally spaced by the width of the fundamental frequency and can be found by repeatedly adding that frequency. For example, if the fundamental frequency is 25 Hz, the frequencies of the harmonics are: 25 Hz, 50 Hz, 75 Hz, 100 Hz, etc. Music has harmonic frequencies of 2, so if you start with a fundamental of 2 Hz, then the second harmonic is 4Hz, the third harmonic is 6Hz, etc.
|
A list of the wavelengths from largest to smallest of the possible standing waves for a given situation is called a harmonic series. The harmonics is numbered from longest to shortest wavelength.
|
|
|
What is Ultrasound?
|

•Sound has 3 fundamental properties: reflection, refraction, and diffraction. Ultrasound imaging is based on the reflection property of sound. A source emits ultrasound, which reflects off a surface back into the detector to form an image. Ultrasound is sound that is too high in frequency for humans to hear. The reflection of sound follows the law "angle of incidence equals angle of reflection", sometimes called the law of reflection. The same behavior is observed with light and other waves, and by the bounce of a billiard ball off the bank of a table. The reflected waves can interfere with incident waves, producing patterns of constructive and destructive interference. This can lead to resonances called standing waves in rooms. Reflection of waves in strings and air columns are essential to the production of resonant standing waves in those systems. A light ray incident upon a reflective surface will be reflected at an angle equal to the incident angle. Both angles are typically measured with respect to the normal to the surface.
|
|
|

What is Density and specific gravity of fluids?
|
•Liquids and gases are fluids.
◦Density: ρ=m/V, where ρ is density, m is mass, and V is volume. ◦The density of water is ρwater = 1 g/mL = 1 kg/L. ◦Specific gravity is the density of something compared to water. ◦Specific gravity = ρ/ρwater. ◦The specific gravity of water is 1. The density of water is also 1000 kg/m^3 = 1 g/cm^3. Ice is less dense than water, meaning that ice has a greater volume that water does. So when ice melts into water, it's volume decreases. When water freezes into ice, it's volume increases (that's why water expands when it freezes). 1x10^6 cm^3 = 1 m^3. When an object immersed in a solvent suffers a loss of mass, the mass that is lost is mass of the fluid displaced. The buoyant force is equal to the weight of the fluid displaced (mass of fluid displaced x g). So, say for instance that the object has a mass of 15 g and loses a mass of 5 g in solvent, the the mass of the fluid displaced is 5g. Let's say also that the fluid (which is the solvent) has a specific gravity of 0.7. Based on the ratio alone, we know that 15g/5g = the ratio of the object's mass to the fluid's mass, which is 3. The object has a mass that is 3 times the mass of the fluid, so the object will have a specific gravity (m/v divided by density of water) that is 3 times the specific gravity of the solvent - 3 x 0.7 = 2.1. Air is more dense in lower altitudes than in higher altitudes. |
For an ideal flow, there is no viscosity, and the radius and length of the pipe do not affect flow rate of an ideal fluid.
|
|

What are some additional ways that you can calculate buoyant force?
|

|
If we consider an object to be a single particle, the buoyant force acts at the center of buoyancy. The center of buoyancy is the point where the center of mass would be, IF the object had a uniform density. If the object is not uniformly dense, the center of
mass and the center of buoyancy will not coincide. This could create a torque on the object and cause it to spin. So if you have a lead substance attached to a foam substance, the center of buoyancy would be in the middle of them, while the center of mass would be in the middle of the lead part of the object. |
|

What is Archimedes’ principle (buoyancy)?
|
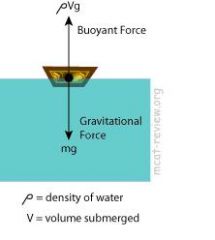
Buoyancy: is an upward acting force, caused by fluid pressure, that keeps things afloat. ◦Archimedes' principle: buoyant force on an object = weight of the fluid displaced by the object. FB is bouyant force. ◦FB = weightdisplaced = mdisplaced*g =ρfluid*Vdisplacedfluid*g. Things float when FB > Weight. The fluid displaced has a weight W = mg. The mass can now be expressed in terms of the density and its volume, m = pV. Hence, W = pVg.It is important to note that the buoyant force does not depend on the weight or shape of the submerged object, only on the weight of the displaced fluid. Archimede's principle applies to object of all densities. If the density of the object is greater than that of the fluid, the object will sink. If the density of the object is equal to that of the fluid, the object will neither sink or float. If the density of the object is less than that of the fluid, the object will float. If an object is submerged it displaces a volume of fluid equal to its own volume. If it is partially submerged it displaces the volume of fluid equal to its submerged volume. If an object is submerged, the volume that the object is submerged is equal to the displaced volume. If the object is floating (not submerged), the weight of the object is the buoyant force (you don't need the volume).
|
Put in other words, the buoyant force is the weight of the object minus the weight of the fluid. A floating object displaces an amount of fluid equal to its own weight. The floating equation says that the SUBMERGED FRACTION of a floating object is equal to the ratio of the density of the object to the density of the fluid in which it is floating. If the object is floating in water, this ratio is the specific gravity of the floating object. Since buoyant force is equal to the "difference" in pressure, the buoyant force does not change with depth. Another way to understand buoyant force is as a result of the pressure difference between the upper and lower surfaces of a submerged object. Since pressure increases with depth, the lower surface of an object experiences greater pressure than the upper surface. This pressure difference multiplied by the upper or lower surface area is equal to the buoyant force because FB = pVg and V = AΔh, so FB = pgAΔh. FB/A = pgΔh and ΔP = pgΔh. A fully submerged object displaces its VOLUME in fluid, a floating object displaces its WEIGHT in fluid.
|
|
|
What is pascal's law?
|
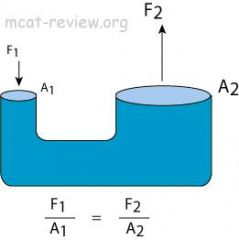
◦Pascal's law: if you apply pressure on a liquid, the pressure is transmitted equally to all parts of the liquid. P = F/A and the unit is in Pascals: N/(m^2). The pressure is the same at a given depth. If pressure wasn't the same, then the fluid would flow to the lower depth and equalize.
The hydraulic press is one of the most important applications of Pascal's law. With this device, one may multiply forces to almost any desired degree. The apparatus consists essentially of a large and a small piston, each within cylinders connected at the base. The whole vessel is filled with fluid. When a pressure is applied to the small piston, this pressure is transmitted through the fluid and acts on the large piston. If the pistons are at the same height, the pressure on each will be equal, so the force upon each will be directly proportional to their respective areas: F1/A1 =F2/A2. The pressure input at one end is the same as the pressure output at the other. You apply a small force over a small area, and the output force at the end with the larger area will be greater. A1d1=A2d2, where d is the distance that the end moves. The work done on one end is the same as the work output at the other. Because the volume of fluid pushed down on the left side equals the volume of fluid that is lifted up on the right side, the following formula is also true: V1 = V2 by substitution: A1d1 = A2d2. Volume is equal to area * distance (cubic meters). If we increase the pressure on one of the surfaces enclosing a fluid, this increase will be transmitted undiminished to all parts of the fluid. The number of times a hydraulic press multiplies the force applied to it is called its mechanical advantage or force ratio. So, for example, a hydraulic press with 100 N exerted over 1 m^2 can hold up to 400 N exerted over 4 m^2. The Pascal is also kg/(m*s^2) |
Also, because ideal machines like hydraulic lifts do not change work, the distance through which the force is applied is inversely proportional to the force, or F1d1 = F2d2.
PRESSURE ONLY DEPENDS ON DEPTH. With these problems, and any questions about area, the pressure is always the same. It doesn't matter how different the areas are, as long as the depth is the same, the pressure is the same. So basically, these variable is the FORCE output. The force and area can be different, but the pressure is the same (at the same depth)! |
|

Explain pressure versus depth.
|
■P=Pa + ρgy. This definition is also Pascal's Law. Pa is the atmospheric pressure. This equation tells you that the pressure increases with the depth of the fluid (y). It is an important equation to know.
■P is pressure, ρ is the density of the fluid; g is the gravitational constant, y is the depth that the object is submerged in the fluid. ■Pressure at the surface is 0 because y = 0. ■Pressure at a depth of y is ρgy. ■For static fluids of uniform density in a sealed vessel, P = ρgy. ■Absolute pressure in a fluid due to gravity somewhere below the surface is P= ρgy + atmospheric pressure. The intuitive explanation of this formula is that the change in pressure between two elevations is due to the weight of the fluid between the elevations. Dense liquids exert a greater pressure than lighter liquids. Pressure is independent of the size and shape of the container. Pressure only depends on the depth. So, things with greater depth, even if the area is the same, the one with the greater depth has the greater pressure and force from pressure. Most gauges read the excess of pressure over atmospheric pressure and this excess is called "gauge pressure". While a useful measurement for many practical purposes, it must be converted to absolute pressure for applications like the ideal gas law. Gauge pressure = absolute pressure - atmospheric pressure. One good way to compare pressures is to first look at the columns of pressure at the same height, because the pressures will be the same there. If one column has more liquid that vapor pressure than the other column from that point, the column with less liquid's vapor pressure is higher than the atmospheric pressure. 1 Pascal = N/(m^2) 1 x 10^5 Pa = 1 atm = 760 torr = 760 mmHg. 1kPa = 1000 Pa. 1atm = 100 kPa |
Air is a fluid. If we open our sealed container and expose it to the atmosphere, we must add atmospheric pressure to any point in our fluid. ln any fluid open to the atmosphere, the pressure can be found from P=Pa + ρgy. This pressure is absolute pressure.
A fluid at rest is one that is experiencing forces only perpendicular to its surface. At any given depth, the pressure is equal to the weight of the fluid above the object with area A divided by the area of the object (F/A). For a fluid at rest with uniform density in a sealed container, pressure P is given by P = ρgy. |
|
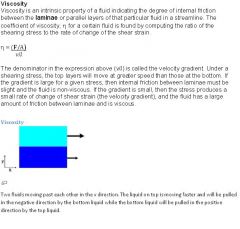
What is Poiseuille flow (viscosity)?
|

Poiseuille's law is only for REAL FLUIDS, not ideal fluids! Poiseuille law is a physical law that gives the pressure drop in a fluid flowing through a long cylindrical pipe. The assumptions of the equation are that the flow is laminar and there is no appreciable turbulence. Viscosity is a measure of the resistance of a fluid which is being deformed by either shear stress or tensile stress. Memorizing the equation for viscosity is not necessary. In real fluids, Poiseuille's law shows the dissipation of energy due to peripheral resistance, the resistance of flow from the channel itself (from friction). The pressure gets lower and lower along the channel because it's losing energy from friction. When the radius is decreased, the flow (volume flux) goes down by a lot. If pressure gradient (change in pressure) is a given, Poiseuille's law will tell you the flow rate (Q). If the flow rate is given, Poiseuille's law will tell you the change in pressure. The continuity equation assumes a constant volume flux, while the Poiseuille's law tells you what the volume flux is after taking into account the radius, the change in pressure, the length of the channel, and the viscosity. Once you know what the volume flux is, then you can use that number to determine what the velocity of the fluid will be given the cross-sectional area. Volume flux or volumetric flow rate is change in volume over time. Also, viscosity creates resistance toward the outer edge of flow. So the velocity of a fluid decreases as it moves from the middle of a channel to the outer edges (if it is viscous). This decrease in velocity is countered by an increase in pressure (just like increases in velocity result in decreases in pressure with Bernoulli equation), but this increase in pressure is on the outer edges. A viscous fluid drags along the sides of the pipe and is therefore slowed near the sides. However, even in real fluids, the fluid must maintain its velocity in the middle of the pipe or it will back up and the pipe will explode (as long as the pipe has the same cross-sectional area).
|
Viscosity is a measure of a fluid's temporal resistance to forces not perpendicular to its surface (rate of shear stress/rate of strain). A fluid's viscosity is its tendency to resist flow. Drag and viscosity are like friction and always act to impede flow. Increasing viscosity increases drag. Drag occurs at the fluid-object interface and is a force working against flow. As we move away from the fluid-object interface, the effect of drag lessens. In a real fluid flowing through a pipe, the greatest velocity would be at the center of the pipe, the spot furthest from the fluid-object interface. Because the sides of the pipe create the greatest drag, the longer the pipe, the greater the amount of fluid-object interface, and the greater is the resistance to flow. Also the more narrow the pipe, the greater the effect of drag.
|
|

What is Continuity equation?
|

One of the fundamental principles used in the analysis of uniform flow is known as the Continuity of Flow. If steady flow exists in a channel, there exists a continuity of flow, defined as: "The mean velocities at all cross sections having equal areas are then equal, and if the areas are not equal, the velocities are inversely proportional to the areas of the respective cross sections." Thus if the flow is constant in a reach of channel the product of the area and velocity will be the same for any two cross sections within that reach. Looking a the units of the product of area (square-feet) and velocity (feet per second) leads to the definition of flow rate (cubic feet per second). This is expressed in the Continuity Equation: Q = a1v1 = a2v2. Where: Q = the volumetric flow rate (also called volume flux and it's change in volume over time) and it is constant throughout the channel. A = the cross sectional area of flow and V = the mean velocity. Q is expressed as cubic feet per second or cubic meters per second. This is the flow of an IDEAL fluid. Where the channel is the narrowest, the flow speed is greatest. The short hand way is if a problem gives the diameter of a circular part of a channel, just square the diameter to get the area if it's comparing to the channel with a different circular part because π just cancels out. I just need to make sure to use AREAS when using this equation. Always remember that in ideal fluids, volumetric flow rate remains constant at all times. The flow rate is volume of fluid passing any point in a given second. With volume flow rate, the volume of fluid flowing in must equal the volume of fluid flowing out. However, when dealing with containers that spills out water, this rule does not quite work because you're dealing with gravity. The velocity of the fluid is based on the height and on gravity. So the flow rate changes. The flow rate being constant is for a channel. With ideal fluid, fluid does NOT always move from high pressure to low pressure, it depends on other factors like gravitational forces. A fluid flows in the direction that will dissipate its energy between gravity, velocity, and pressure.
|
Since ideal fluids are incompressible, their volume remains constant. The volume of a fluid moving through a section of pipe is given by the cross-sectional area (A) of the pipe times the distance (d) of the pipe section. If this same volume of fluid moves completely through this pipe section in a given time (t), the rate (Q) at which volume passes through the pipe is Ad/t. Since the fluid moves a distance d in time t, its velocity is v = d/t. Therefore, Q = Av. Flow can be given in terms of mass as well. For the mass flow rate (I) multiply the volume flow rate by density I = ρQ = ρAv or mv. This is momentum (mass time velocity). In an ideal fluid, flow rate is constant. Area is inversely proportional to velocity; the narrower the pipe, the greater the velocity. Pressure has no direction. The driving force behind the direction of fluid flow is the fluid's tendency to find its greatest entropy. If all other things are equal, fluid will move from high pressure to low pressure. In a horizontal pipe of constant cross-sectional area, fluid will flow from high pressure to low pressure according to: ΔP = QR, where R is the resistance to flow and Q is the flow rate.
|
|
|
What is the Concept of turbulence at high velocities?
|
In fluid dynamics, turbulence or turbulent flow is a fluid regime characterized by chaotic, random property changes. It is characterized by low diffusion, high convection, and rapid variation of pressure and velocity. Flow that is not turbulent is called laminar flow. Generally in the body, blood flow is laminar. Laminar flow occurs when a fluid flows in parallel layers, with no disruption between the layers. Every particle follows the path of the particle before it within a streamline. Turbulence causes the formation of eddies of many different length scales. Irregular, abrupt changes in the pattern of fluid motion, called eddy currents, characterize turbulent flow, which occurs due to high fluid velocity or under certain conditions which cause abrupt changes in fluid motion. Low velocity -> laminar flow. High velocity -> turbulent flow, forms eddies. Turbulence increases the energy required to drive blood flow because turbulence increases the loss of energy in the form friction, which generates heat. Pressure is the change of momentum of the fluid molecules as they collide with the surface of the object divided by the time and surface area. Why? Because mΔv = FΔt. P = F/A. So P = mΔv/AΔt
|
Laminar flow means that all fluid flowing through any fixed point will have the same velocity. Remember, velocity specifies magnitude and direction. Turbulence means that, at any fixed point in the fluid, the velocity may vary with time. Ideal fluids experience irrotational flow. This means that any object moving with the ideal fluid will not rotate about its axis as it flows (forming eddies), but will continue to point in one direction regardless of the direction of flow. On the MCAT, all liquids and gases are ideal unless otherwise indicated.
|
|
|
What is Surface tension?
|
◦Surface tension gives the surface of a liquid the ability to support things that are very light.
◦For example, insects can walk on water due to surface tension. ◦Surface tension is due the attraction between the molecules of the solvent. Surface tension is the intensity of the intermolecular forces per unit length. Much like a spring, when the molecules at the surface of the water are pushed downward by the weight of the needle, the intermolecular bonds of the water are stretched, and push upward with a force. Surface tension is also responsible for the formation of water droplets. Intermolecular forces pull inward tending to minimize the surface area by creating a more spherical shape. A sphere has the least surface area per volume of any shape. Since surface tension is a function of the intermolecular forces, it is dependent upon the temperature of the fluid (the higher the temperature, the weaker the intermolecular forces because the molecules have more energy and move about more and can escape, and so the weaker the surface tension) and upon the fluid with which it is interfacing. |
Related to surface tension is the phenomenon of capillary action, where a fluid may be pulled up a thin tube. For capillary action, recognize that there are 2 types of forces acting: the intermolecular forces responsible for surface tension (cohesive forces); and the forces between the molecules of the tube and the fluid molecules (adhesive forces). If the cohesive forces are stronger, a convex meniscus is formed and the fluid is pulled downward by the vertical component of the surface tension. If the adhesive forces are stronger, a concave meniscus is formed and the fluid is pulled upward by the vertical component of the surface tension.
|
|

What is Bernoulli’s equation?
|
P + ½ρv^2 + ρgh = constant. This is constant throughout.
The Bernoulli equation is for an IDEAL fluid and it states that where points 1 and 2 lie on a streamline: 1)the fluid has constant density 2)the flow is steady, and 3) there is no friction. The Bernoulli Equation can be considered to be a statement of the conservation of energy principle appropriate for flowing fluids. The qualitative behavior that is usually labeled with the term "Bernoulli effect" is the lowering of fluid pressure in regions where the flow velocity is increased. This lowering of pressure in a constriction of a flow path may seem counterintuitive, but seems less so when you consider pressure to be energy density. In the high velocity flow through the constriction, kinetic energy must increase at the expense of pressure energy. In fluid dynamics, Bernoulli's principle states that for an inviscid flow, an increase in the speed of the fluid occurs simultaneously with a decrease in pressure or a decrease in the fluid's potential energy. P = static pressure - it's the energy stored in the work of compressing - it's the energy the fluid can expend in performing work as it decompresses from one area to another- it's like the potential energy of the fluid after it has been compressed. ½ρv^2 is the velocity pressure or speed of the fluid, (associated with the kinetic energy) and ρgh is the fluid's potential energy. P + ½ρv^2 is the total pressure of the system. The h in the second term is similar to gravitational potential energy and is measured from the bottom to the top (opposite from the direction of measurement of y in P = ρgy. The zero value for h can be chosen arbitrarily. If a spigot is attached to a tank of fluid is opened, and we choose h = 0 to be the point of the spigot, the velocity of the fluid coming from the spigot can be derived from Bernoulli's equation as v = sqrt(2gh) because all of the potential energy in the container (ρgh) is converted into kinetic energy. |
The constant is specific to a fluid in a given situation of flow, and P, h, and v refer to the pressure, height, and velocity of the fluid at any given point. WARNING: h in Bernoulli's equation is NOT the same as y in P = ρgy. h is the distance ABOVE some arbitrary point; y is the distance beneath the surface. If we multiply any of the terms in Bernoulli's equation by volume, we get units of energy. The second term ρgh gives the gravitational potential energy per unit volume (mgh/V). The third term gives the kinetic energy from the uniform translational motion of the molecules per unit volume (1/2mv^2/V). The first term, pressure, is the energy per volume from the random motion of the molecules. Because energy is conserved in ideal fluid flow, the total energy must remain constant, thus the sum of the 3 terms is constant throughout the fluid. P = ρgh in the second term of Bernoulli's equation is NOT the pressure, it is the potential energy of the fluid. P = Pa + ρgy is the absolute pressure.
|
|
|
What is the density of solids?
|
•Density: ρ=m/V, where m is mass and V is volume.
The amount of solids can be manipulated by increasing or decreasing pressure, based on Le Chatelier's Principle. If the mass doesn't change in a chemical process, and we increase the pressure, the volume will decrease (Boyle's law). So if the volume decreases, the density increases of the substance. If the density increases, then you have facilitated the formation of more of that substance. Although these rules generally apply to gases, extremely high pressures make the process possible with solids and liquids. The reason it generally applies to gases is because solids and liquids are for the most part incompressible. |
|
|

What are the Elastic properties (elementary properties) of solids?
|
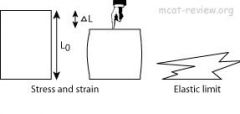
The picture is showing tensile stress, which Young's modulus measures. ◦Stress: the pressure exerted on an object. σ = tensile stress = F/A.
◦Strain: the deformation of the object in the direction of the applied force divided by the original length. ε = tensile strain = ΔL/L0. ◦Young's modulus = tensile stress / tensile strain. ◦Young's modulus, the ratio between stress and strain, is constant until you reach the elastic limit, where things get permanently deformed. Units for the Young Modulus are Pascals (Pa) or newtons per square metre (Nm^-2). The Young Modulus describes pulling forces. There are three types of elastic modulus for the three major kinds of deformation: Young's modulus, shear modulus, and bulk modulus. A discussion of elasticity focuses on solid body deformations and the forces that cause such deformations. The stress upon a body is a quantity that depends upon the forces causing deformation. The strain measures the degree to which the body is deformed. Different materials are deformed to a greater or lesser degree by applied force. For deformations which obey Hooke's law, in that the force of compression is proportional to displacement from equilibrium, the elasticity of a material is quantified by the elastic modulus, the ratio of stress to strain: The elastic modulus is a constant for an object up to the elastic limit (the yield point), beyond which the stress produces such a strain that, when the force is removed, the object does not return to its original shape. Even further beyond the yield point one can reach the breaking point (also called fracture point). Solids, liquids, and gases are capable of withstanding a force perpendicular to its surface (like tensile stress). Only solids are capable of withstanding a force that is not perpendicular to its surface (like a shear stress) |
In general, atoms or molecules tend to be held together rigidly in solids. However, all solids are, to some extent, elastic. In other words, they can change their dimensions by stretching or compressing, but not breaking, these rigid bonds.
Stress has the same units as pressure but by convention we use N/(m^2) and not Pascals to distinguish it from pressure. Strain has no units because it's a ratio. Stress is what is done to an object, and strain is how the object responds. The stress-strain ratio is not described accurately by the modulus when the stress exceeds the yield point. |
|
|
What is elastic limit?
|
•Elastic limit: The maximum stress something can handle before it breaks or become permanently deformed. Elastic limit, also referred to as yield point, is an upper limit for the stress that can be applied to a material before it permanently deforms. This limit is measured in Newtons per square meter, also known as pascals (Pa).
|
|
|
|
What is Thermal expansion coefficient?
|
◦Things expand when temperature rises, and contracts with temperature falls. All materials change their size when subjected to a temperature change as long as the pressure is held constant. ΔL = αLΔT. ΔL is the change in length, L is the initial length, ΔT is the change in temperature, and α is the coefficient of linear expansion for the substance. In the same fashion as linear expansion, the equations for volume and area expansions are below. ΔV = βVΔT. ΔA = γAΔT, where A and V are the initial areas and volumes. All materials change their size when subjected to a temperature change as long as the pressure is held constant. The coefficient of thermal expansion describes how the size of an object changes with a change in temperature. When things are heated, they expand, and therefore, their volume increases. If their volume increases, then the density of the material decreases. Also, increased volume lowers pressure, if pressure isn't constant.
|
Solids typically expand when heated. As their molecules absorb energy, their vibrations require more room. Expansion is typically considered one dimension (linear expansion), two dimensions (area expansion), or three dimensions (volume expansion).
|
|

What is Shear?
|
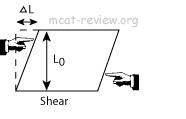
A shear stress, is applied to the top or bottom of the square, but the force is in the opposite direction of the bottom or top force. So, if you apply a force to the bottom of a square, and bottom of the square doesn't move, it still has a force at the bottom of the square that's opposing the force at the top. Shear stress is opposed to a normal stress in which the force is applied perpendicularly. This stress results in a strain, or deformation, changing the square into a parallelogram. Shear strain is a strain that acts parallel to the surface of a material that it is acting on. Normal strain, in contrast, acts perpendicular to the surface. Strain is the change in the displacement from an initial placement to a final placement. The formula to calculate average shear stress is: τ = F/A, where τ = the shear stress, F = the force applied, A = the cross sectional area. Shear modulus, G. is defined as the ratio of shear stress to the shear strain: G = (F/A)/(ΔL/L0). F/A is shear stress and ΔL/L0 is shear strain and it is also equal to tanΘ. Note: ΔL and L are perpendicular to each other.
|
All moduli work in both directions. For instance, Young's modulus works for tensile compressive forces and tensile stretching forces. Also, in each case, the force used in the equation is not the sum of the forces, which would be zero, but the magnitude of one of the forces. Remember that stress/strain are ratios, so F/A is a ratio and change in length over length is a ratio, and the moduli are constants. So even if the height of one substance changes, or an area changes, the strain and the stress stays the same. The change in length or the force may change, but stress and strain are ratios (like densities), so it stays constant.
|
|

What is compression?
|
Physical compression is the result of the subjection of a material to compressive stress, resulting in reduction of volume. The opposite of compression is tension. In simple terms, compression is a pushing force. Compression yields noticeable amounts of stress and tension. Tension is the magnitude of the pulling force exerted by a string, cable, chain, or similar object on another object. As tension is the magnitude of a force, it is measured in Newtons and is always measured parallel to the string on which it applies. By inducing compression, mechanical properties such as compressive strength or modulus of elasticity, can be measured. Sound is transmitted through gases, plasma, and liquids as longitudinal waves, also called compression waves. Longitudinal sound waves are waves of alternating pressure deviations from the equilibrium pressure, causing local regions of compression and decompression, while transverse waves (in solids) are waves of alternating shear stress at right angle to the direction of propagation. Sound waves travel as compression waves in liquids, gases, as well as solids because the energy travels through the atomic structure by a series of compressions and expansion movements. Transverse waves (shear stress) cannot propagate in a gas or a liquid because there is no mechanism for driving motion perpendicular to the propagation of the wave and that is why sound travels only in solids as both transverse waves and longitudinal waves, while sound only travels as longitudinal waves in liquids and gases. Transverse waves can occur on the surface of a liquid (where there is surface tension) but not through the liquid itself. Solids and liquids are nearly incompressible, if we are looking at their bulk modules, because bulk modules measures the amount of pressure from ALL SIDES of the solids and liquids and reduce their volume. Only gases can be compressed from ALL SIDES and be reduced in volume, because the gas molecules are much farther apart. However, solids, liquids, and gases can be compressed by longitudinal waves because these waves do not affect the volume of the matter, instead, the particle displacement is parallel to the direction of wave propagation.
|
Bulk's Modulus measures compression and expansion. This is ΔP/(ΔV/V), where ΔP is (F/A), and ΔV is the change in volume, and V is the original volume. The higher the bulk modulus, the less compressible the substance. So solids and liquids have higher bulk moduli than gases because they are incompressible, compared to gases.
|
|
|
What are Charge, conductors, and charge conservation of electrostatics?
|
■Charges are either positive or negative. Zero charge is neutral.
■Like charges repel, unlike charges attract. ■Charge is quantized, and the unit of charge is the Coulomb. ■Conductors are materials in which charges can move freely. Metals are good conductors. ■Charge is always conserved. You can't create or destroy charge, you can only transfer charge from one source to another. This is similar to the conservation of energy. Good conductors, such as metals, allow electrons to flow relatively freely. Poor conductors (good resistors) hold electrons tightly in place. Poor conductors are represented by, among other substances, network solids such as diamond and glass. Like a uniformly charged sphere, the electric field inside a uniformly charged conductor is zero. |
Charge is quantized. This means that any charge must be at least as large as a certain smallest possible unit. The smallest possible unit of charge is one electron unit (e = 1.6 x 10^ -19 C), the charge on one electron or one proton.
|
|
|
What are insulators?
|
■Insulators are materials in which charges can not move freely. Nonmetals are good insulators.
|
|
|

What is Coulomb’s law and sign conventions?
|
F = kq1q2/r^2,
■k = 9E9 Nm^2/C^2 ■q is positive for positive charges and negative for negative charges. When a positive and negative charge attract, the potential energy is negative and they fall into a well of their binding energy. ■Positive F = repelling force. ■Negative F = attractive force. Like charges repel, unlike charges attract. The electric force acting on a point charge q1 as a result of the presence of a second point charge q2 is given by Coulomb's Law. Note that this satisfies Newton's third law because it implies that exactly the same magnitude of force acts on q2 . The electric potential energy is given by: U = kqQ/r. This potential energy converts into kinetic energy (and work). Say you have molecules of a gas that are attracted to each other by electrostatic forces. If the volume of the gas were allowed to increase, and no energy were allowed to enter or leave, as the molecules moved farther apart, the kinetic energy would decrease. Why? Since the molecules are attracted to each other, as they separate, their potential energy increases (since radius is in the denominator of the potential energy equation). The potential energy is the repelling or attracting potential of the charges once they come close to each other. The charges that they come close to may either repel them with a force or attract them with a force. Since energy is neither created nor destroyed, and the potential energy is increasing, then kinetic energy must be decreasing. So if you try to push two like charges together, the potential energy increases (it becomes more positive), and pushing them together is the work required to push them. It's like pushing them up a mountain. When you pull unlike charges apart, it's like pulling them out of a well - pulling them apart makes the potential energy more positive (closer to zero). If you pull like charges apart, the potential energy gets smaller and approaches zero as well. |
The electric field is found by E = kq1/(r^2). The electric force is also F = Eq. This is why we can simply electric force to F = Eq instead of F = kq1q2/(r^2).
Just like gravitational force F = mg, we say electric force is F = Eq for shorthand. To find the potential energy of a mass in the earth's gravitational field relative to some other position, we multiply this force times the displacement in the direction opposite the field, mgh. Similarly, the potential energy (U) of a charge in an electric field is the force times the displacement (d): U = Eqd. d is measured from a zero point of our own choosing, similar to h in gravitational potential energy. Since this particular electric potential energy is dependent upon position, it is also a type of potential energy. |
|
|
What are field lines?
|

■Electric field is denoted by the vector E. Longer lines denote stronger fields than shorter lines and the direction of the arrows of the lines point in the direction of the electric field. Lines that are closer together denote stronger fields than lines that are farther apart. Electric fields direct away from positive charges, and direct towards negative charges. The unit for electric field is N/C, or Newtons per Coulomb. Electric field lines of force are a more useful means of visually representing the vector nature of an electric field. Rather than draw countless vector arrows in the space surrounding a source charge, it is perhaps more useful to draw a pattern of several lines which extend between infinity and the source charge. These electric field lines, point in the direction which a positive test charge would accelerate if placed upon the line. That's why the lines are directed away from positively charged source charges and toward negatively charged source charges. To communicate information about the direction of the field, each line must include an arrowhead which points in the appropriate direction. The number of lines are usually limited and is sufficient to convey the infinite number of lines of the electric field in the space surrounding the lines. Along an y-x axis, the vector of the net force on a certain charge depends on the repulsive force or the attractive force of other charges around it. So, say we have a positive charge, the vector of the force of a negative charge near that charge would produce a vector that is in the direction of the negative charge, as if it was pushing it towards that negative charge. The vector of a force of a positive charge near the positive charge would produce a vector that is in the direction away from the positive charge, as if it was pushing it way. All of the vectors would be on the charge of interest. The length of the vectors for the forces depends on the amount of charge and distance between the charges, so if the distance is farther, the vector length is shorter, if the charge is 2 times great, the vector length is longer, because longer vector lengths signify stronger forces. The net direction of the force on the charge of interest takes into account all vectors acting on it.
|
|
|
|
Explain electric field due to charge distribution for dipole, 2 charges, and vector sum.
|
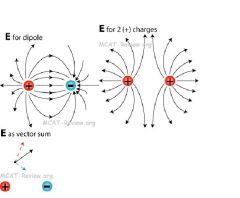
■Field lines come out of the positive end and goes into the negative end of a dipole.
■Field lines for two negative charges would like the same as those for two positive charges except that the direction of the field lines would be reversed. ■The direction and magitude of the field at any point in space can be calculated as the vector sum of all the field components there. |
Notice that like the work done by gravity, the work done by an electrostatic field is independent of the path. This is because both fields are conservative; they both conserve mechanical energy. As we will see when we discuss magnetism this is not true of all electric fields.
|
|
|
Explain the electric field due to charge distribution for capacitors, wire, and cylinders.
|
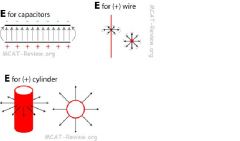
■Electric field in between a capacitor is uniform until it reaches the ends of the capacitor.
■Electric field for wires runs radially perpendicular to the wire. ■Electric field for a cylinder runs radially perpendicular to the cylinder, and is zero inside the cylinder. |
|
|

What is absolute potential at point in space?
|

■Absolute potential (V) is the amount of energy per charge that something possesses. V = U/q0 = k(q/r). For a point charge the absolute potential (or electric potential) of any position in its electric field is U = k(q/r). It is the electric potential energy (U) divided by charge associated with an electric field (q0). V is the electric potential (absolute potential) caused by q, which is experienced by q0. q is the charge that is causing the potential, not the charge that's experiencing the potential and it is the point charge. Traditionally, q0 is the charge experiencing the potential and it is the test charge. The magnitude of q0 is very small. U is the electrical potential energy possessed by q0. ■r is the distance between the potential-causing charge and the charge that's experiencing the potential (r is always positive). If there are multiple charges contributing to the potential, then calculate the potentials each of them causes (positive charges cause positive potentials, and negative charges cause negative potentials), and sum them together. The unit for electric potential is Volts (V) or Joules per Coulomb (J/C).
|
Make sure to know the difference in problems with whether you are working with point charges or with a constant electric field like with capacitors. Use the q1 and q2 equations if you're working with point charges, and use the equations that don't have q1 and q2 if you're working with a constant electric field (a field with no point charges).
|
|
|
What is Potential difference (ΔV)?
|
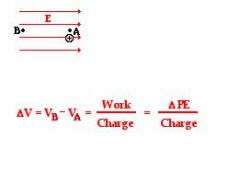
■ΔV = VB - VA . Potential difference is used in scenarios such as the difference in potential between the two plates of a capacitor, or the positive and negative terminals of a battery. Consider the task of moving a positive test charge within a uniform electric field from location A to location B as shown in the diagram. In moving the charge against the electric field from location A to location B, work will have to be done on the charge by an external force. The work done on the charge changes its potential energy to a higher value; and the amount of work which is done is equal to the change in the potential energy. As a result of this change in potential energy, there is also a difference in electric potential between locations A and B. This difference in electric potential is represented by the symbol V and is formally referred to as the electric potential difference. By definition, the electric potential difference is the difference in electric potential (V) between the final and the initial location when work is done upon a charge to change its potential energy. The standard metric unit on electric potential difference is the volt, abbreviated V. One Volt is equivalent to one Joule per Coulomb. If there are 3 point charges, and you need to figure out the voltage or potential of 1 of them, with the others as given, what you do is find the potential of the charge to 1 of the charges, then the potential of the same charge to the other charge, and then add them together. That is the potential that the charge of interest. Force of an electric field is F = Eq.
|
Voltage (V) is the potential for work by an electric
field in moving any charge from one point to another: V = Ed. Voltage is given in units of volts (V), and is a scalar. You should also recognize voltage in units of J/ c. Voltage of a point charge is also V = kq1/r. That's why Voltage is: V = Ed, E = kq1/(r^2), and you multiply it by distance and get voltage. |
|
|
What are equipotential lines?
|
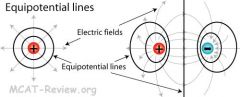
■Equipotential lines are places where the potential is the same.
■Equipotential lines are always perpendicular to electric field lines. All points on an equipotential surface are at the same voltage. An equipotential surface can be drawn at any point in the field. |
|
|
|
What is an electric dipole?
|
■dipole = a positive charge and a negative charge separated by some distance.
A dipole moment p = qd. An electric dipole is created by two opposite charges with equal magnitude. A dipole moment is a vector whose magnitude is the charge q on one of the charges times the distance d between the charges. In physics, this vector points in the opposite direction to the electric field, from the negative charge to the positive charge. In chemistry the vector points from positive to negative. The net force on a dipole in a capacitor is 0 because a dipole is made has equal but opposite charges on either end. The force on each end of the dipole is Eq and in opposite directions. Therefore, the net force is zero. |
|
|

What is the behavior of electric dipoles in electric field?
|

■A dipole in an electric field will want to align itself with the electric field, such that the positive end of the dipole is in the direction of the electric field. A dipole placed in an electric field is at equilibrium when the dipole moment points in the same direction as the field line. A dipole that is not at equilibrium will tend to rotate toward alignment with the field line. If a dipole is placed in a uniform electric field, constant through space, then the total force (but not the torque) is zero since the forces on the plus and minus charge are equal and opposite. So the dipole rotates but its center of mass stays in the same place. If a dipole is placed in a non-uniform field, the two charges experience difference forces, and the direction of the net force must be determined by adding these forces. In physics, an electric dipole is a separation of positive and negative charges. The simplest example of this is a pair of electric charges of equal magnitude but opposite sign, separated by some (usually small) distance. If you are asked to find the force of the dipole, inside of a capacitor, then you use the equation F = E*q. Since we have a parallel capacitor, the electric field in the capacitor is constant. The charges of the dipole is equal and opposite, so the force will be equal and opposite - that is why the force is 0. However, the dipole has torque - they rotate in this electric field and align themselves to it. This rotation is not zero. Remember, torque is F*rsinθ. In general, the net force on dipoles in capacitors are zero, but the net torque is not zero. Parallel capacitors are unique in that they have a constant electric field inside of them (until you get to the ends). Electric fields in cylinders and wires doesn't have this same property.
|
|
|

What is the potential energy due to electric dipoles?
|
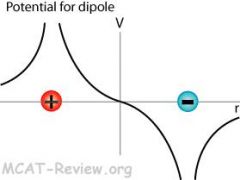
A dipole will rotate to align with an uniform electric field, but feel no net force. Since the dipole tends to rotate, it must experience a net torque. The potential energy of a dipole is the energy that is stored in the dipole when it is away from equilibrium before it moves to equilibrium. If the field is not uniform, the dipole will experience a net force. This means the force depends on how the field changes. If the dipole is allowed to rotate it will come to equilibrium (if there are losses in the system) with its dipole moment aligned with the field. This behavior implies the dipole is seeking the minimum in potential energy. To calculate the potential energy of an electric dipole with orientation θ with respect to a uniform field, we have to calculate the work required to rotate the dipole from the location of zero potential energy (equilibrium) to the orientation θ away from equilibrium. The difference in potential energy, ∆U, is the energy due to the position of the dipole when it is away from equilibrium. rotate the dipole. E = F/q. The potential energy U of an electric dipole with dipole moment p in a uniform electric field E is U = -p*EcosΘ, where Θ is the angle between the dipole and the field. Negative sign indicates the decrease in potential in the direction of the field as the angle gets smaller. When the angle approaches 90°, cos90° is 0, so the potential energy becomes more positive and becomes larger until it reaches zero. The potential energy of a dipole represents the binding energy of the dipole when it is aligned to the electric field.
|
|
|
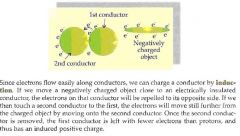
What is electrostatic induction?
|
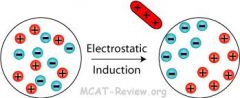
■Induction does not involve any type of conduction.
■Electrostatic induction is where a charged object induces the movement / redistribution of charges in another object. ■The classical example of electrostatic induction is picking up pieces of paper using a comb rubbed against fur. ■It's called electrostatic induction because it's static - the charged species polarizes non-charged species by simply being there. This is not the same as electromagnetic induction, which is how electric generators work. |
|
|

What is Gauss's law?
|
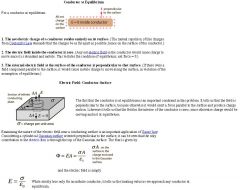
Gauss's law is a law relating the distribution of electric charge to the resulting electric field. Gauss's law states: The electric flux through any closed surface is proportional to the enclosed electric charge. The electric flux is proportional to the charge. Electric flux is the field intensity times the area. Flux is a measure of the number of field lines passing through an area. ΦE = EA cosθ. ΦE is electric flux. E is electric field, A is area that the field goes through, and θ is the angle between the field and the normal of the area. ΦE = q/ε0. For an enclosed surface, the electric flux is equal to q, the charge inside the enclosure over ε0, the electric constant (also called the permitivity of free space). The net electric flux through any enclosed surface is totally dependent on the charge inside. If there's no charge inside, then the net electric flux through the enclosure is zero. An important application of Gauss's law is the Faraday cage. Basically, the electric field inside a closed conducting cage is zero. This is because the charges on the conducting cage will rearrange to cancel out any external field.
|
|
|
|
What is the Definition of the magnetic field B?
|
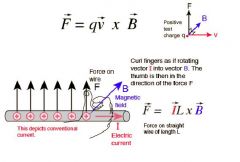
■Magnetic field B exists in a region of space if a moving charge experiences a force due to its motion in that region.
■The unit for magnetic field is the Tesla (T) or (N*s)/(m*C). Magnetic fields are produced by electric currents, which can be macroscopic currents in wires, or microscopic currents associated with electrons in atomic orbits. The magnetic field B is defined in terms of force on moving charge. F = qvB Like the positive and negative of electricity, a magnetic field comes with north and south poles, where like poles repel and opposite poles attract. The lines of force in a magnetic field point from the north pole to the south pole. A changing electric field creates a magnetic field. A stationary charge does not create a magnetic field, a moving charge does. Current is moving charge. Thus, a current creates a magnetic field. Must know: 1) A magnetic field is generated by a moving charge 2) A moving charge experiences force when moving through a magnetic field. |
A changing magnetic field creates an electric field. However, unlike the electric field created by a stationary charge, this field is non-conservative. The mechanical energy creating the electric field is not conserved, but is dissipated as heat in the charged object. Thus, electric potential has no meaning for electric fields induced by changing magnetic field.s
|
|
|
Explain the Existence and direction of force on charge moving in magnetic field.
|
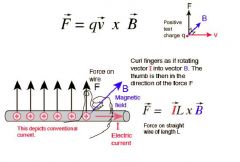
■F = qvB sinθ
■θ is the angle between the charge velocity and the magnetic field. Sometimes the sinθ is omitted as 1 as θ is assumed to be 90°. The magnetic force on a stationary charge or a charge moving parallel to the magnetic field is zero. The force is always perpendicular to both the magnetic field and to the velocity of the charge. You can use the right hand rule to predict the direction of the force. Point fingers into the direction of the velocity and curl them into the magnetic field. The thumb is in the direction of force. Since velocity and the magnetic field are both vectors, and their product, force, is a vector, the product will always be perpendicular to the other two vectors. |
If you are just trying to figure out the direction of the magnetic field given a current (and not force), use the right hand and place your thumb in the direction of the current and grab the wire. The direction in which your fingers wrap around the wire is the direction of the magnetic field.
|
|
|
Explain the scenario of a Charge moving in a circle in a magnetic field.
|
■F = qvB = mv^2/r
■You are setting the electromagnetic force equal to the centripetal force, which maintains the orbit. Using this equation, you can solve for whatever the question asks you. If the path is circular, then the particle must be traveling at 90 degrees to the magnetic field (otherwise the path would be helical). Since this electromagnetic force is always perpendicular to the velocity, it does no work (W = Fdcosθ). It changes the direction, but never the magnitude of the velocity. Thus, this force always acts as centripetal force and can be set equal to mv^2/r to find the radius of curvature of the path of the particle. |
|
|
|
Explain the scenario of a Current carrying wires in a magnetic field.
|
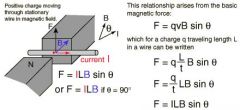
The magnetic force on a current-carrying wire is perpendicular to both the wire and the magnetic field with direction given by the right hand rule. ■i is current, L is length of wire. Force = Current x Length x B-field. F = ILBsinθ, where θ is the angle between the wire and the magnetic field. Consider the current in the wire as moving positive charges (by tradition, the direction of the current is defined as the direction of moving positive charges from the positive end to the negative end. You can calculate the direction of the force on the wire in the same way using the right hand rule. Point fingers in the direction of the current and curl fingers as if rotating the current into the magnetic field. The thumb is then in the direction of the force. If two current carrying wires are parallel to each other, their respective magnetic fields can either attract or repel each other. The force is perpendicular to the wire and the magnetic field.
|
|
|
|
Explain the following property of electromagnetic radiation: radiation velocity equals constant c in vacuo (in vacuum).
|
■Electromagnetic radiation travels fastest in a vacuum, at a velocity equals c, or 3x10^8m/s, the speed of light
■Light slows down when it travels in a medium other than in a vacuum. ■n = c/v, where n is the index of refraction for the medium, and v is the speed of light traveling in that medium. Visible light includes all wavelengths from 390nm to 700nm. Shorter wavelengths correspond to violet light and longer wavelengths to red light. Ultraviolet means beyond violet from the visible spectrum and infrared is beyond red from the visible spectrum. Roy G. Biv - red, orange, yellow, green blue, indigo, violet. Wavelengths toward ultraviolet light have more energy. The greater the index of refraction, the slower the light moves through that particular medium. |
|
|
|
What does electromagnetic radiation consist of?
|
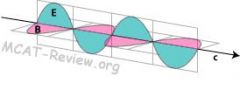
■radiation consists of oscillating electric and magnetic fields that are mutually perpendicular to each other and to the propagation direction. Light, electricity, and magnetism are manifestations of the same thing called electromagnetic radiation. The electric and magnetic fields oscillate at right angles to each other and the combined wave moves in a direction perpendicular to both of the electric and magnetic field oscillations. This energy also comes in many forms that are not detectable with our eyes such as infrared (IR), radio, X-rays, ultraviolet (UV), and gamma rays.
|
|
|
|
What is the Classification of electromagnetic spectrum (radio, infrared, UV, X-rays, etc.) ?
|
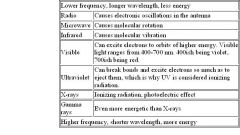
|
|
|
|
What is the Current of circuit elements and what are the sign conventions and units?
|

I = ΔQ/Δt
◦Current is the rate of charge flow through the cross-section of a conductor (wire). ◦Traditionally, the direction of current is taken as the flow of positive charges from the positive terminal to the negative terminal. The negative terminal has an excess of electrons and the positive terminal has a deficiency of electrons. The current flow is a current of positive charges, so they flow to where the is an excess of electrons (at the negative terminal). However, the actual electron flow is opposite the direction of the current. In conductors, only negatively charged electrons are free to move, so they move from the negative terminal (where there are many electrons) to the positive terminal (where there aren't many electrons). ◦The unit for current is Coulombs per second, C/s. When two points at different electric potentials are connected by a conductor, charge flows between the two points (and creates a current). |
Moving charge is called current. Current is
a scalar, but we describe its flow to be in the direction of the movement of positive charge. Current, however, is created by flowing electrons, but it is the opposite direction of the flow of electrons. |
|

What is Kirchhoff's junction rule for circuits?
|
At any point or junction in a circuit (such as a parallel circuit that closes into a series), the sum of currents directed into that point (like from the parallel circuit into the series circuit) equals the sum of currents directed away from that point. This is a consequence of the conservation of electric charge. Basically, you evaluate the currents across each resistor as a parallel current or a series current and add accordingly.
Kirchoff's first rule states that the amount of current flowing into any node must be the same amount that flows out. A node is any intersection of wires. If we imagine current as fluid, it becomes obvious that the rate at which fluid flows into an intersection must match the rate at which fluid flows out. Otherwise, a pipe would burst. Kirchoff's second rule states that the voltage around any path in a circuit must sum to zero. If we imagine voltage as the height difference between two points, this rule states the obvious that the height of the starting point does not change when we go around some path (regardless of the path) and end up back where we started. |
|
|
|
What is Battery, electromotive force, and voltage?
|
◦Electromotive force (emf) is really not a force, but a potential difference of a motor or generator and it's unit is voltage. It is like a lossy battery in that it has a built-in internal resistance. In general, voltage is energy per unit charge, regardless of what system you are working with. This generated voltage by a motor or generator has been traditionally called an "electromotive force" or emf. The emf represents energy per unit charge (voltage) which has been made available by the generating mechanism and is not a "force". An ideal battery is a kind of emf with no internal resistance. But we don't consider ideal batteries to have emf - they have just a potential difference (in volts). If the battery has no internal resistance, then emf = potential difference (in Volts) across the battery. Volts is what we use when we say V = IR, the volt is the usable voltage. In motors (lossy batteries) with internal resistance, the usable voltage is V = emf - IRinternal. In ideal batteries, the voltage is just the voltage across the terminal potentials that we can use and it has no built in internal resistance. EMF is the voltage across the terminals of a cell when no current is flowing. A battery is said to produce Emf (electromotive force) which is defined as the chemical energy of a battery (or cell) converted into electrical energy when unit charge passes through the source. It represents the total energy that can be supplied to a circuit. All batteries and generators dissipate heat internally when giving out a current, due to internal resistance. A perfect battery has no internal resistance, but unfortunately there is no such thing as a perfect battery. Nickel-Cadmium and Lead-Acid batteries have very low internal resistance, and we can regard these as almost perfect - meaning their EMF equals the voltage when there is a current. These batteries can provide very high currents. Voltage is how much work can an electric field do on a charge. V = E/q if you have a uniform electric field, like a capacitor and it's called electrostatic voltage. If you are talking about battery voltage when there is a current flowing, and you want to know the voltage than can be supplied to a circuit, you have to calculate the voltage drop. Voltage drop = emf - IRinternal. This is because some voltage is lost from the resistor.
|
Assume on the MCAT that there is no internal resistance.
|
|
|
What is Terminal potential and internal resistance of battery?
|
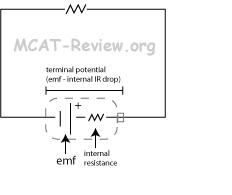
◦Terminal potential voltage (voltage drop) is the voltage across the terminals of a battery when current is flowing out. Because cells typically have a small internal resistance (Rinternal) of their own, the voltage they actually furnish to a cell is reduced by IRinternal, where I is the current supplied by the cell. Terminal potential Voltage = emf + IRinternal. Note that if the cell is supplying no current (I = 0), or if the cell has no internal resistance (Rinternal = 0), then V = emf. Emf is the voltage across the terminals of a cell when no current is flowing. For cases in which the current supplied is greater than zero and the internal resistance is not negligible, V < emf. When a cell is supplying current (discharging), the current flows out of the positive terminal and into the negative terminal. When a cell is being recharged, current from another source is sent into the positive terminal.
|
|
|
|
What is Ohm’s law?
|
◦Ohm's law (I = V/R) or V = IR. In electrical circuits, Ohm's law states that the current through a conductor between two points is directly proportional to the potential difference or voltage across the two points, and inversely proportional to the resistance between them. Resistance R can be thought of as the opposition within a conductor to the flow of an electric circuit. This opposition takes the form of energy loss or drop in potential. Ohm's law states that the voltage drop across a resistor is proportional to the current it carries, with R being the proportionality constant: V = IR. V is the potential difference measured across the resistance in units of volts; I is the current through the resistance in units of amperes and R is the resistance of the conductor in units of ohms. More specifically, Ohm's law states that the R in this relation is constant, independent of the current. ( I ) Current is what flows on a wire or conductor like water flowing down a river. The direction of the current flows from positive terminal to negative terminal on the surface of a conductor. Current flows in the direction of positive charges. Current is measured in (A) amperes or amps. ( V ) Voltage is the difference in electrical potential between two points in a circuit. It's the push or pressure behind current flow through a circuit, and is measured in (V) volts. ( R ) Resistance determines how much current will flow through a component. Resistors are used to control voltage and current levels. A very high resistance allows a small amount of current to flow. A very low resistance allows a large amount of current to flow. Resistance is measured in ohms.
|
Look at properties of resistance using p = RA/L or R = Lp/A. This formula demonstrates that if the length of a wire is doubled or its cross-sectional area is cut in half, its resistance is also doubled.
|
|
|
Explain resistors in series.
|
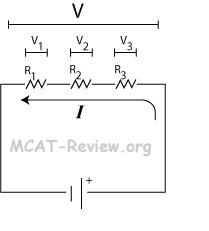
■Iseries = I1 = I2 = I3. All resistors in series share the same current. Vseries = V1 + V2 + V3. Voltage drop among resistors in series is split according to the resistance - greater resistance, greater voltage drop (V = IR). Resistors can be connected in series; that is, the current flows through them one after another. Total Resistance = R1 + R2 + R3.
In our diagram, if there were 3 equal value resistors and the total voltage was 12V, the total voltage would be divided equally between them. They would each have a voltage drop of 4 volts (3*4=12). As you can see, the voltage drop across all of the resistors will add up to the power supply voltage. |
|
|
|
Explain resistors in parallel.
|
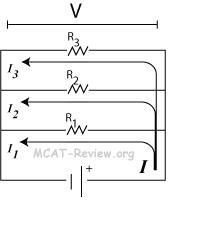
■Vparallel = V1 = V2 = V3
■All resistors in parallel share the same voltage. ■Iparallel = I1 + I2 + I3 ■Current among resistors in parallel is split according to the resistance - greater resistance, less current (I = V/R). Resistors can be connected such that they branch out from a single point (known as a node), and join up again somewhere else in the ciruit. This is known as a parallel connection. Note that the node does not have to physically be a single point; as long as the current has several alternate paths to follow, then that part of the circuit is considered to be parallel. Total Resistance R of R1, R2, and R3 is 1/R = 1/R1 + 1/R2 + 1/R3 Resistance is easier because there are multiple avenues for the circuit to go through. Each additional resistor added in parallel acts to decrease the total resistance and thus increase the current. The effect of adding resistors in parallel is the same as that of increasing the cross-sectional area of a conductor - it increases the path by which current can flow and thereby decreases resistance. If you are just evaluating 1 parallel circuit box, and there are 2 resistors and you only know the current through 1 of them, then all you need to do is: I1*R1 = I2*R2, because the voltage is the same for the parallel circuit box. With these problems, evaluate each circuit individually. Parallel circuits are circuits which have each end side of the battery. Series have circuits that have only 1 end at the side of the battery. |
|
|
|
What is resistivity?
|
ρ = RA/L. ρ is the static resistivity, R is the electrical resistance in ohms, L is the length of the material in meters, A is the cross-sectional area of the specimen in m^2. Resistivity is the inverse of conductivity σ (sigma), of the material or ρ = 1/σ. Electrical conductivity is a measure of a material's ability to conduct an electric current. When an electrical potential difference is placed across a conductor, its movable charges flow, giving rise to an electric current. Greater resistivity, greater resistance of the material. Rearranging the above equation to get R = ρL/A. To make a wire of low resistance, select a material that has low resistivity, keep the wire short, and keep the diameter of the wire large. Extension cords are made really thick to keep the resistance down, so it doesn't heat up and cause a fire. Electrical resistivity is a measure of how strongly a material opposes the flow of electric current. A low resistivity indicates a material that readily allows the movement of electrical charge. The SI unit of electrical resistivity is the ohm metre (Ω m). Resistance R of an object is measured in ohms.
|
When charge moves along an object (usually in the form of electrons), that object is said to be conducting electricity. At the same time that it is conducting electricity, the object also resists the movement of charge. All substances conduct electricity to
some extent, and all substances resist movement of charge to some extent (superconductors excluded). Substances resist and conduct charge to different degrees. We classify most substances as conductors or resistors. The quantitative measurement of the resistance to flow of charge is resistivity. |
|
|
Explain the concept of parallel-plate capacitor.
|
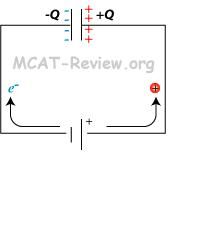
■C = Q/V = εA/d
■Greater capacitance is created by a greater charge on plates (Q) for a given voltage (V), greater plate area (A), or smaller distance between plates (d). ■V = Ed, where V is voltage across capacitor, E is electric field between capacitor, and d is the distance between capacitor plates. In other words, something with a high capacity can store a lot of charge at low voltage. In a parallel plate capacitor, since the charge sits on the surface of the plates, the taller and wider the face of each plate, the more charge each plate will be able to store. Recall also that voltage is defined by distance (V = Ed). Thus, the farther the plates are separated, the greater the voltage, and the lower the capacitance. |
|
|
|
What is the energy of charged capacitor?
|
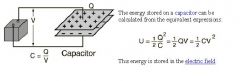
■U = Q^2/2C = ½QΔV = ½C(ΔV)^2. U is the potential energy of the charged capacitor, Q is charge stored (magnitude of either +Q or -Q on one of the plates), C is capacitance. From the definition of voltage as the energy per unit charge, one might expect that the energy stored on this ideal capacitor would be just QV. That is, all the work done on the charge in moving it from one plate to the other would appear as energy stored. But in fact, the expression above shows that just half of that work appears as energy stored in the capacitor. For a finite resistance, one can show that half of the energy supplied by the battery for the charging of the capacitor is dissipated as heat in the resistor, regardless of the size of the resistor. The battery transports charge from one plate of the capacitor to the other and this energy is stored in the electric field between the plates.
|
If we were to graph Q vs. V, the area under the curve would be the product of the charge times voltage or potential energy. The area is a triangle, which is 1/2 base times height or U = 1/2QV.
|
|
|
Explain capacitors in series.
|
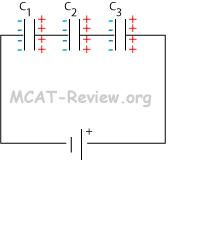
1/Ceq = 1/C1 + 1/C2 + 1/C3
Each additional capacitor added in series decreases the total capacitance of the circuit, so just as for resistors in parallel, the reciprocal of the total capacitance in series is equal to the sum of the reciprocals of the individual capacitances. For capacitors in series, the total voltage is the sum of the individual voltages. |
|
|
|
Explain capacitors in parallel.
|
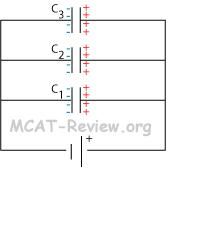
■Ceq = C1 + C2 + C3
The capacitors wired in parallel can be thought of as combining to form a single capacitor with increased capacitance. Since the wire from one capacitor to the next is a conductor and an equipotential surface, the potential of all the plates on one side are the same. As with resistors, the voltage across each parallel capacitor is the same. |
|
|
|
Explain the Discharge of a capacitor through a resistor.
|
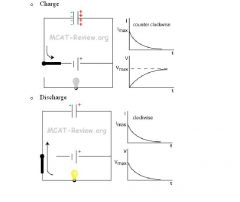
◦During the discharge of a capacitor, the capacitor acts as a battery and drives current flow, which decreases with time as the capacitor discharges.
|
|
|
|
Explain the concept of Discharge of a capacitor through a resistor.
|
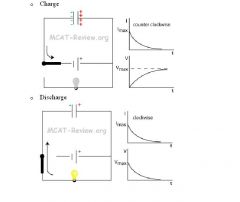
◦During the discharge of a capacitor, the capacitor acts as a battery and drives current flow, which decreases with time as the capacitor discharges.
The charge on the capacitor decays exponentially with a time |
|
|
|
What is the conductivity theory?
|
◦Conductivity is affected by electrolyte concentration: No electrolyte, no ionization, no conductivity. Optimal concentration of electrolyte, greatest conductivity due to greatest mobility of ions. Too much electrolyte, ions are too crowded, less ion mobility, less conductivity. Conductivity is affected by temperature: In metals, conductivity decreases as temperature increases. In semiconductors, conductivity increases as temperature increases. At extremely low temperatures (below a certain critical temperature typically a few degrees above absolute zero), some materials have superconductivity - virtually no resistance to current flow, a current will loop almost forever under such conditions. When superconductive, a material has an electrical resistance of exactly zero. ◦Conductivity (σ) is the inverse of resistivity (ρ). Place a capacitor inside a solution, the solution will conduct a current between the plates of the capacitor, thus you can measure the conductivity of a solution using a capacitor.
|
|
|
|
What is the power in circuits?
|
◦P = IV. P = I^2*R. P = V^2/R. Calculate power according to what you are looking at. If you are looking at the power used up in the resistor, use I^2*R. If you are looking at the total power use P = IV, where I is total current and V is total current. If you are looking at the power across a single voltage source, use P = V^2/R. ◦P is power, I is current, V is voltage, R is resistance. ◦Power companies try to save the amount of copper needed for power lines by using thinner wires, which makes R quite high. To minimize P dissipated by the wires, they minimize I by maximizing V. This is why power lines transfer electricity at high voltage. Power is a measure of how much work can be performed in a given amount of time. Work is generally defined in terms of the lifting of a weight against the pull of gravity. The heavier the weight and/or the higher it is lifted, the more work has been done. Power is a measure of how rapidly a standard amount of work is done. In electric circuits, power is a function of both voltage and current. Power (P) is exactly equal to current (I) multiplied by voltage (V). When using this formula, the unit of measurement for power is the watt, abbreviated with the letter "W."
|
As current goes through a resistor, heat is generated. The rate at which heat is generated is the power dissipated. P = I^2*R and P = V^2/R are applicable only to energy dissipated as heat by a resistor.
|
|
|
What is the Root-mean-square current and voltage?
|

◦Irms = Imax/√2 = 0.7 Imax
◦Vrms = Vmax/√2 = 0.7 Vmax These two solutions are for a sinusoidal wave only. Alternating currents (AC) are sinusoidal currents. In alternating current (AC, also ac) the movement (or flow) of electric charge periodically reverses direction. An electric charge would for instance move forward, then backward, then forward, then backward, over and over again. In direct current (DC), the movement (or flow) of electric charge is only in one direction. Root mean square is used for alternating currents. |
|
|
|
How is average power related to root-mean-square?
|

Pavg = Irms*Vrms = I^2rms*R
•Vrms = Irms*R Finding the average power using root mean square is for alternating currents. |
|
|
|
Explain the Concept of interference and the Young double slit experiment for light (electromagnetic radiation).
|
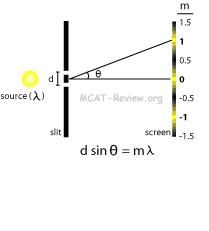
◦In order for interference to occur, the follow conditions must hold:
■the interfering light sources must be coherent. This means they must constantly maintain the same phase relationship. The light coming from the two slits in Young's double slit experiment are coherent because a single light source shines through both slits. ■the light source must be monochromatic (of single color/wavelength/frequency). ■dsinθ = mλ ■bright bands occur at m = 0, +/-1, +/-2 ...etc ■dark bands occur at m = +/-0.5, +/-1.5, +/-2.5 ...etc |
|
|
|
What are single slits?
|

■Light shining through a single slit casts a central bright band followed by a series of maximas and minimas on either side.
■The equation for a single slit diffraction is different from the equation for the double slit. ■asinθ = mλ ■a is the width of the slit. ■Maxima occurs for m = 0 (big central maxima), +/-1.5, +/-2.5 , etc. ■Minima occurs for m = +/-1, +/-2, +/-3, etc. A long slit of infinitesimal width which is illuminated by light diffracts the light into a series of circular waves and the wavefront which emerges from the slit is a cylindrical wave of uniform intensity. |
|
|
|
What are thin films?
|
◦Thin films provide a means for interference to occur.
■Light reflecting off the outer and inner boundary of a thin film interfere with each other. ■A film of oil on water has the appearance of a swirly rainbow due to this interference. Interference between light waves is the reason that thin films, such as soap bubbles, show colorful patterns. This is known as thin-film interference, because it is the interference of light waves reflecting off the top surface of a film with the waves reflecting from the bottom surface. To obtain a nice colored pattern, the thickness of the film has to be similar to the wavelength of light. |
|
|
|
What is diffraction grating?
|
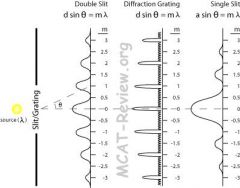
■Diffraction = light spreads out after passing through the slit, instead of going in a straight path. Diffraction grating = a slab with many slits close together. The equation for a diffraction grating is the same as the double-slit experiment.
■dsinθ = mλ. d is the distance between the slits and m is an integer. Bright bands occur at m = 0, +/-1, +/-2 ...etc . Dark bands occur at m = +/-0.5, +/-1.5, +/-2.5 ...etc. In optics, a diffraction grating is an optical component with a regular pattern, which splits and diffracts light into several beams travelling in different directions. The directions of these beams depend on the spacing of the grating and the wavelength of the light so that the grating acts as the dispersive element. Because of this, gratings are commonly used in monochromators and spectrometers. |
|
|
|
What are other diffraction phenomena?
|

◦Light shining through a pin hole will not appear on the screen as a pin hole. Instead, it will be a diffraction pattern of circular bright and dark bands, with a central bright band. Light shining past an opaque boundary will not cast a sharp shadow of the boundary on the screen. Instead, fringes of bright and dark bands appear above the boundary. Light shining past a penny will not cast a completely black shadow. Instead, there will be a central bright spot, as well as patterns of bright and dark rings.
|
|
|
|
What is the Polarization of light?
|
◦Unpolarized light = light with electric field oscilating in many planes. It's called isotropic light.
◦Polarized light = light with electric field oscilating in only one plane. When isotropic light is polarized, it loses its intensity since it loses components in the other directions. ◦Applications of polarization: ■Selective absorption: pass light through polarizer that absorbs all but light with electric field in one plane. ■Reflection: at a certain polarizing angle, all reflected light is polarized. ■Double refraction: birefringent (double refraction) materials have two indices of refraction that splits the incident light into two rays polarized perpendicular to each other. ■Scattering: air molecules scatter light, which becomes polarized. ■Opticaly active molecules either rotate polarized light clockwise or counterclockwise. |
|
|
|
Explain the Doppler effect (moving light source or observer).
|
◦Red shift = frequency decreases = occurs when source and observer is moving away from each other. Red shift also means the wavelength is longer
◦Blue shift = frequency increases = occurs when source and observer is moving toward each other. Blue shift also means the wavelength is shorter. ◦Observed in astronomy, when stars appear redder/bluer than they really are because they are moving away (red appearing) or toward us (blue appearing). That's where the red shift (moving away) and blue shift (moving toward us) comes from. Light waves from a moving source experience the Doppler effect to result in either a red shift or blue shift in the light's frequency. This is in a fashion similar (though not identical) to other sorts of waves, such as sound waves. The major difference is that light waves do not require a medium for travel. The doppler effect of sound requires a medium like air or water, whereas light can travel in a vacuum. Using the doppler effect equation, we can tell how the changes of frequencies changes with the the speed of waves in different medium. For instance, the speed of light (electromagnetic radiation like radio waves, UV light, etc), has the largest velocity. So by dividing the top and bottom by the speed of light the change in frequency due to the speed of light is going to be smaller than for, say the change of frequency for the speed of sound. Sound waves travel more slowly than light waves - any other wave travels more slowly than light. Also, since sound waves (or any other wave) travels more slowly and since it's change in frequency is larger, than the change in wavelength is larger too than for light waves (because speed of wave is wavelength times frequency). |
Also remember that for objects moving in the same direction at the same speed, there is no Doppler Effect; the relative velocity is zero, so the change in frequency is zero. The period of a pendulum is not related to the mass of the bob. It is similar to projectile motion in this respect. It is possible to think of a pendulum like a 'guided' body in free fall.
|
|
|
Explain the energy of Visual spectrum for color.
|
■Blue = greatest energy, shortest wavelength, highest frequency.
■Red = least energy, longest wavelength, lowest frequency. ■Energy per photon = hf, where h is planck's constant and f is frequency. Light is made up of photons and each photon represents an electromagnetic wave. Don't be mislead by the E = hf! This equation gives the energy PER PHOTON. It turns out that if we double the frequency, we also double the number of photons, increasing the energy by a factor of 4. Planck's quantum theory demonstrates that electromagnetic energy is quantized (i.e. it comes only in discrete unites related to the wave frequency). In other words, if we transfer energy from one point to another via an electromagnetic wave, and we wish to increase the amount of energy that we are transferring without changing the frequency, we can only change the energy in discrete increments given my E = hf, where h is Planck's constant (6.6 x 10^-34 J*s). The energy of a single photon is given by the same equation: E of a photon = hf. |
|
|
|
Explain the lasers of Visual spectrum for color.
|
■Laser = light amplification by stimulated emission of radiation. Normal light emission = spontaneous emission. Laser emission = stimulated emission. Repeated stimulated emission inside the lasing medium (by reflecting light back and forth through it) amplifies light. Light amplification by stimulated emission of radiation (LASER or laser) is a mechanism for emitting electromagnetic radiation, typically light or visible light, via the process of stimulated emission. The emitted laser light is (usually) a spatially coherent, narrow low-divergence beam, that can be manipulated with lenses. In laser technology, "coherent light" denotes a light source that produces (emits) light of in-step waves of identical frequency, phase, and polarization. The laser's beam of coherent light differentiates it from light sources that emit incoherent light beams, of random phase varying with time and position. Laser light is generally a narrow-wavelength electromagnetic spectrum monochromatic light; yet, there are lasers that emit a broad spectrum of light, or emit different wavelengths of light simultaneously.
|
|
|
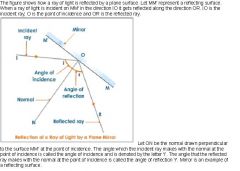
What is the Reflection from plane surface for geometric optics?
|
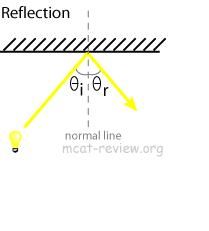
Angle of incidence equals angle of reflection. Mirrors completely reflect light. Going from one medium to another results in partial reflection of light. The reflection at any plane surface is found to obey the laws of reflection. The laws of reflection are: 1) The incident ray, the reflected ray and the normal at the point of incidence all lie in the same plane. 2) The angle of incidence is equal to the angle of reflection. The angle of reflection is separate from the angle of refraction.
|
|
|
|
What is dispersion?
|

The speed of light is slower in various materials than it is in a vacuum or outer space. When the light passes into a material at an angle, the light beam is bent or refracted according to Snell's Law and the index of refraction of the material. But also, the speed of light through a material varies slightly with the wavelength or frequency of the light. Thus, each wavelength is refracted at a slightly different angle when passing through a material at an angle. This spreading out of the beam of light is called dispersion or chromatic dispersion. This can be seen when sunlight passes through a glass prism. Dispersion: change of index of refraction with wavelength. Blue light refracts more than red light in a prism. White light passes through a prism and gets split into colors of the rainbow due to dispersion. Generally the index of refraction decreases as wavelength increases, and blue light travels more slowly in the transparent material than red light. Longer wavelengths (lower frequencies like red light) move faster through a medium than shorter wavelengths (higher frequencies like blue/violet light) and so the longer wavelengths bend less dramatically at the media interface because they move quicker through it.
|
|
|
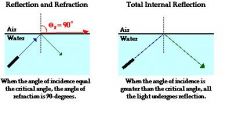
What are the Conditions for total internal reflection?
|

◦Going from a medium of HIGH index of refraction to a medium of LOW index of refraction. Angle of incidence > critical angle. Find the critical angle by: n1*sinθc = n2*sin90°. n1 > n2. θc = critical angle. Total internal reflection (TIR) is the phenomenon which involves only the reflection of all the incident light off the boundary and no refraction. TIR only takes place when both of the following two conditions are met: 1) the light is in the more dense medium and approaching the less dense medium. 2) the angle of incidence is greater than the so-called critical angle. Total internal reflection will not take place unless the incident light is traveling within the more optically dense medium towards the less optically dense medium. TIR will happen for light traveling from water towards air, but it will not happen for light traveling from air towards water. TIR would happen for light traveling from water towards air, but it will not happen for light traveling from water (n=1.333) towards crown glass (n=1.52). TIR occurs because the angle of refraction reaches a 90-degree angle before the angle of incidence reaches a 90-degree angle. The only way for the angle of refraction to be greater than the angle of incidence, is for light to bend away from the normal. Since light only bends away from the normal when passing from a more dense medium into a less dense medium, then this would be a necessary condition for total internal reflection. Total internal reflection only occurs with large angles of incidence. Question: How large is large? Answer: larger than the critical angle.
|
With total internal reflection, the if the angle of incidence is large enough, none of the light will refract. This angle is the critical angle. The critical angle is when the angle of refraction is 90° to the normal and sin90° = 1. The angle of incidence is always equal to the angle of reflection. This angle of incidence in TIR is the critical angle and this critical angle is equal to the angle of reflection.
|
|
|
What are concave mirrors?
|

|
|
|
|
What are convex mirrors?
|

|
|
|

What are mirror curvature, radius, and focal length?
|
■mirror curvature can be concave or convex.
■concave mirrors can focus light, so it's converging. ■convex mirrors can't focus light, so it's diverging. ■The focal length for a mirror is 1/2 of the radius of curvature. f = 1/2r ■converging mirrors have positive focal length, while diverging mirrors have negative focal length. ■It's called the focal length because rays parallel to the principle axis of the mirror will converge at the focal point (for diverging mirrors, the extrapolated rays will pass through the focal point). The focal point for a lens is affected by the refractive indices of the lens and the medium that the lens is in. It is also affected by the radii of the curvature of both sides of the lens. Since the index of refraction varies for different frequencies, the focal point of a lens also varies with frequency resulting in chromatic aberration. |
The closer the index of refraction (n) for a lens or a mirror is to the surrounding medium, the less it will refract light. For instance, if you have a glass lens that you are using to magnify light in the air, it has a bigger difference in n than the glass and water. So the magnification would decrease between the glass and water from the glass and air. If a lens is immersed in a fluid with an equal index of refraction, it will not refract light at all.
|
|
|
What is the Law of Plane Mirrors in reference to the distance of the image?
|
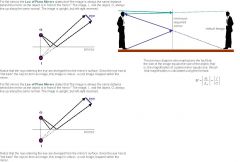
A plane mirror produces an image behind its plane at a distance equal to the object distance in front of the plane. Suppose a certain far-sighted person can see objects clearly no closer than 300cm away. The minimum distance from a plane mirror that such a person can see his reflection clearly is 150 cm, he has to be 150 cm away from the plane mirror, and the plane mirror will reproduce a virtual image on the other side of the mirror that is 150cm away.
|
|
|

What are real and virtual images?
|
■real images are always inverted, and can be cast on a screen.
■virtual images are always erect (noninverted), and can not be cast on a screen. ■For concave mirrors, real images (positive q) are formed in front of the mirror, where light is reflected by the mirror and can be cast on a screen. It's impossible for light to be cast behind the mirror, so anything behind the mirror is virtual (negative q). ■For convex mirrors, images are always virtual (negative q). ■Note: diverging mirrors and lenses (convex mirrors and concave lenses) can never form real images. A virtual image does not actually exist outside the mind of the observer; no light rays emanate from a virtual image. A real image exists separately from the observer. Rays of light actually intersect and then emanate from the point of intersection to form a real image. |
|
|
|
What are converging and diverging lenses for thin lens?
|
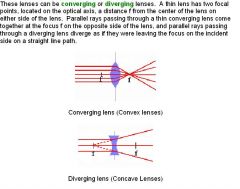
◦You don't have to re-learn everything for lenses, because they are almost the same as mirrors: Convex lenses are the same as concave mirrors (both are converging) except for the following: Real images are on the opposite side of the lens as the object. Because light travels through the lens and can focus on a screen behind the lens. Virtual images are on the same side of the lens as the object. Because light can't focus in front of a lens and be cast on a screen. Concave lenses are the same as convex mirrors (both are diverging) except for the following: The virtual images formed by the lens is on the same side of the lens as the object. Because light can't focus in front of a lens and be cast on a screen. The image height vs. object distance curve is exactly the same as those of mirrors (convex lenses the same as concave mirrors, concave lenses the same as convex mirrors). Diverging lenses form reduced, erect, virtual images.
|
Here's a trick to remember a converging LENS: Remember the 3 C's: A thiCk Center Converges light. If the center of a lens is thicker than its ends, it will converge light, regardless of its shape or which direction light moves through the lens. If the center is thinner, it will diverge light.
|
|
|
Are the focal lengths for converging and diverging lenses positive or negative for thin lens?
|

■Focal length for converging lens is positive. This is because the object and the image is on opposite sides of the lens. The object is on one side of the lens, and the image is at the focus point at the other side of the lens. It is a real image.
■Converging lens is convex. ■Focal length for diverging lens is negative. This is because the object and the image is on the same side of the lens. Since the lens diverges, it can't focus the image on the other side of the image. The image is a virtual image on the same side as the object. ■Diverging lens is concave. Concave mirrors and convex lenses are both converging lenses and convex mirrors and concave lenses are both diverging lenses. |
|
|
|
What is the mirror equation for thin lens?
|

(1/p) + (1/q) = 1/f
■same deal as with mirrors. ■p always positive. ■q is positive for real images, and negative for virtual images. ■f is positive for converging lenses, and negative for diverging lenses. |
|
|
|
What are real and virtual images for thin lens?
|
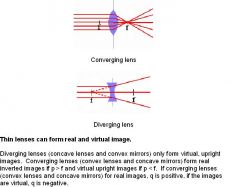
■Real images are inverted and can be cast on a screen.
■Virtual images are erect and can not be cast on a screen. ■For convex lenses, real images (positve q) are formed behind the lens because light passes through the lens and focuses there. ■For concave lenses, images are always virtual (negative q), and forms in front of the lens. The image characteristics are the same for converging lenses (convex lenses and concave mirrors) and diverging lenses (concave lenses and convex mirrors). |
|
|
|
What are lens strength and diopters for thin lens?
|
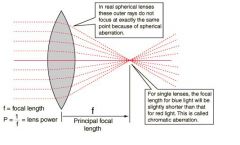
■Lens strength, or lens power is measured in diopters.
■P = 1/f f is the focal length and it is in METERS. ■where P is in diopters. The most important characteristic of a lens is its principal focal length, or its inverse which is called the lens strength or lens "power". Optometrists usually prescribe corrective lenses in terms of the lens power in diopters. The lens power is the inverse of the focal length in meters: the physical unit for lens power is 1/meter which is called diopter. This power is not the same as the power in mechanics. If the focal length is negative, then the power will be negative and it's a diverging lens or mirror. |
|
|
|
What is lens aberration?
|
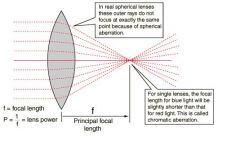
■spherical aberrations: not all light will focus at the focal point. For lenses made with spherical surfaces, rays which are parallel to the optic axis but at different distances from the optic axis fail to converge to the same point in the case of spherical abberation. Chromatic abberation: blue light gets refracted more than red light, so different colors focus differently. Blue light refracts more than red light because of Snell's law and because blue light has a higher refractive index. A lens will not focus different colors in exactly the same place because the focal length depends on refraction and the index of refraction for blue light (short wavelengths) is larger than that of red light (long wavelengths). The amount of chromatic aberration depends on the dispersion of the glass. A lens will not focus different colors in exactly the same place because the focal length depends on refraction and the index of refraction for blue light (short wavelengths) is larger than that of red light (long wavelengths). The amount of chromatic aberration depends on how the glass disperses light. Chromatic dispersion is the change of index of refraction with wavelength. Generally the index decreases as wavelength increases, blue light traveling more slowly in the material than red light. Dispersion is the phenomenon which gives you the separation of colors in a prism. It also gives the generally undesirable chromatic aberration in lenses.
|
|
|

What are optical instruments?
|
◦Eye = lens focuses real image on retina. The lens of your eye is a double convex lens. Its job is to focus the image on the retina of the eye. Glasses = diverging (concave) lens for near-sightedness, converging (convex) for far-sightedness. People who are near-sighted can see things close up, but not far away. They use concave lenses because concave lenses decrease the sizes of objects. They don't need things increased in size, they need things decreased in size. People who are far-sighted can see far, but not things close up. They need things increased in size, so they use the convex lenses because convex lenses increase the sizes of objects. Magnifying glass = virtual, erect, larger image formed when p < f for a converging lens. A magnifying glass is a convex lens which is used to produce a magnified image of an object. A magnifying glass works by creating a magnified virtual image of an object behind the lens. The distance between the lens and the object must be shorter than the focal length of the lens for this to occur. Otherwise, the image appears smaller and inverted, and can be used to project images onto surfaces. When you use an optical instrument, whether it be something very simple like a magnifying glass, or more complicated like a telescope or microscope, you're usually trying to make things look bigger so you can more easily see fine details. One thing to remember about this is that if you want to make things look bigger, you're always going to use converging mirrors or lenses. Diverging mirrors or lenses always give smaller images.
|
Mirrors reflect light and lenses refract light. In both cases, light rays are bent.
|
|
|
What is the Emission spectrum of hydrogen and the Bohr model?
|

•Bohr model: An electron orbits the positively charged nucleus in the same way that the earth orbits the Sun. Electrostatic attraction pulls the electron toward the nucleus. The electron orbits a high speed to prevent it from crashing into the nucleus. The electron can orbit at different energy levels: n=1, n=2, n=3 ...etc. The higher the energy level, the larger the radius from the nucleus. Emission spectrum of hydrogen: When an electron transitions from a higher energy level to a lower energy level, it emits electromagnetic radiation. The emission spectrum of hydrogen consists of 4 sharp, distinct lines from dark purple to red. The electrostatic force keeps the electron in orbit around the nucleus of positive charges (protons + neutrons). The electrostatic force is the force that is primarily responsible for chemical behavior. The electrostatic force is the attraction of the electrons between bonds. The ionization energy is the energy required to completely separate 2 charges (the minimum energy to remove an electron)- it has to overcome the potential energy, where the potential approaches zero when the distance between the charges approaches infinity.
|
|
|
|
What are quantized energy levels for electrons?
|
◦The distinct lines of the emission spectrum prove that electron energy is quantized into energy levels. If electron energy is not quantized, then a continuous spectrum would be observed. The energy of the hydrogen energy levels is governed by: E= - 13.6eV/n^2 , where E is energy and n is the energy level. One electron volt is the energy that an electron gains when it travels through a potential difference of one volt (1 eV = 1.6 x 10-19 Joules). The equation is negative, so all energies are negative. Negative energies mean that it is energy that contributes to the "stability" of the system - the electron binding energy. The more negative (lower) the energy, the more stable the orbit, the harder it is to knock out the electron. The less negative (higher) the energy, the less stable the orbit, the easier it is to knock out the electron. At the highest energy, 0 eV, there is no binding energy, so the electron dissociates. For atoms other than hydrogen, the shape of the energy level curve stays the same. However, the numerator is a constant other than 13.6 eV. The precise relationship for atoms other than hydrogen is: E = - (Z^2 * Re)/n^2, where Z is the atomic number and Re is a constant. Higher Z values give more negative binding energy (more stable) because the more charge, the more electrostatic attraction. A particle with charge q has an energy E=qV after passing through the potential V; if q is quoted in units of charge and the terminal potential in volts, one gets an energy of electrons in eV.
|
|
|

What is the calculation of energy emitted or absorbed when an electron changes energy levels?
|

◦Energy is emitted for transitions to lower energy levels (nf < ni).
◦Energy is absorbed for transitions to higher energy levels (nf > ni). |
|
|
|
What is atomic number and atomic weight?
|
•Atomic number = the number of protons. Atomic weight = the number of protons + neutrons. When two things have the same number of protons, they are the same element.
•The atomic number is what defines an element. On the periodic table, atomic weight is not a whole number because it is a weighted average of all the isotopes for that element. •The atomic weight is what defines an isotope. Atomic weight, atomic mass, amu (atomic mass unit), g/mol - they are all the same thing. In standard notation the atomic number is always at the bottom, and the weight is always on top. An easy way to remember this is that the atomic number is "fundamental" to the identity of the element, so it is located at the foundation. Charge is indicated to the right of the atom. |
|
|
|
What are Neutrons, protons, and isotopes?
|
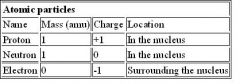
•Neutrons = neutral particles that reside in the nucleus.
•Protons = positive particles that reside in the nucleus. •Isotopes = things with the same number of protons, but different number of neutrons. •Nucleons = protons or neutrons. •Isotopes often have similar chemical properties, but different stabilities (some decay and give off radiation, some don't). |
|
|
|
What are nuclear forces?
|
•Two forces are at work in the nucleus: the strong force and the electromagnetic force.
•The strong force binds the nucleons together, and is therefore contributes to the binding energy. It is responsible for binding of protons and neutrons into atomic nuclei. •The electromagnetic force is due to electrostatic repulsion between the positively charged protons in the nucleus. •The nucleus stays together because the strong force is much stronger than the electromagnetic repulsion. •The strong force is also called the "nuclear force". |
|
|
|
What are alpha, beta, and gamma particles of radioactive decay?
|

The ratio of neutrons to protons for small stable atoms is 1:1, and the ratio of neutrons to protons for large stable atoms is greater than 1:1. As the mass numbers become higher, the ratio of neutrons to protons in the nucleus becomes larger. For helium-4 (2 protons and 2 neutrons) and oxygen-16 (8 protons and 8 neutrons) this ratio is unity. For indium-115 (49 protons and 66 neutrons) the ratio of neutrons to protons has increased to 1.35, and for uranium-238 (92 protons and 146 neutrons) the neutron- to-proton ratio is 1.59. The high neutron-to-proton ratio makes the nucleus of atoms unstable. The instability caused by this excess of neutrons is generally rectified by successive beta emissions (beta minus decay), each of which converts a neutron to a proton and moves the nucleus toward a more stable neutron-to-proton ratio. Radioactive decay is when atoms spontaneously break apart to produce energy. Energy is released because the atoms are converting to a more stable form. Beta decay, positron emission, alpha decay, and gamma decay are all forms of radioactive decay.
|
|
|
|
What is half-life of radioactive decay?
|

•Half-life: the time it takes for the amount of something to half due to decay.
•When something is stable, they don't decay. •When something is unstable, they decay. •The more unstable something is, the shorter the half-life. •After 1 half-life, the amount of the original stuff decreases by half. •After 2 half-lives, the amount of the original stuff decreases by a factor of 4. •After 3 half-lives, the amount of the original stuff decreases by a factor of 8. |
|
|
|
What is exponential decay of radioactive decay?
|
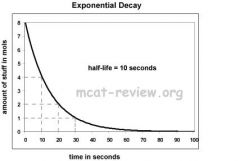
A quantity is said to be subject to exponential decay if it decreases at a rate proportional to its value.
If No is the initial population and the decay rate is k then the population N at time t is: N = No*e^kt, where k<0 |
|
|
|
What are semi-log plots of radioactive decay?
|
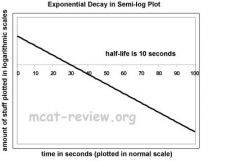
•Semi-log plots: for the purposes of the MCAT, semi-log plots convert exponential curves into straight lines. Something that curves up becomes a straight line with a positive slope. Something that curves down becomes a straight line with a negative slope. For exponential decay, a semi-log plot graphs the log of amount vs. time. For exponential decay, a semi-log plot is a straight line with a negative slope. The semi-log plot intercepts the x axis where the original y value is 1. Semi-log plot is a way of visualizing data that are changing with an exponential relationship. One axis is plotted on a logarithmic scale. This kind of plot is useful when one of the variables being plotted covers a large range of values and the other has only a restricted range – the advantage being that it can bring out features in the data that would not easily be seen if both variables had been plotted linearly.
|
|
|
|
What is the General nature of fusion?
|
•Fusion = two nuclei coming together.
•The Sun works by fusion. •Hydrogen in the Sun fuses to form helium. nuclear fusion is the process by which multiple atomic nuclei join together to form a single heavier nucleus. |
|
|
|
What is energy liberated and binding energy of the atomic nucleus?
|
•Mnucleons = Mnucleus + binding energy. The nuclear binding energy is derived from the strong nuclear force and is the energy required to disassemble a nucleus into the same number of free unbound neutrons and protons it is composed of, in such a way that the particles are far/distant enough from each other so that the strong nuclear force can no longer cause the particles to interact. Mnucleons > Mnucleus because some of the Mnucleons is converted to binding energy that holds the nucleons together. Binding energy = converting ΔM into its equivalent in energy = ΔM*c^2. The conservation of mass and energy: the total mass and energy before a reaction is always the same as the total mass and energy after the reaction. If the total mass before the reaction is different from the total mass after the reaction, then the difference in mass is made up for by energy. The difference in mass before and after a reaction is called the mass deficit or mass defect. The energy that makes up for the mass deficit is calculated by: E = mc^2. When the nucleons are grouped together to form a nucleus, they lose a small amount of mass, i.e., there is mass defect. This mass defect is released as (often radiant) energy according to the relation E = mc2; thus binding energy = mass defect × c2. This energy is a measure of the forces that hold the nucleons together, and it represents energy which must be supplied from the environment if the nucleus is to be broken up. It is known as binding energy, and the mass defect is a measure of the binding energy because it simply represents the mass of the energy which has been lost to the environment after binding.
|
|
|
|
What is acceleration and what are the key kinematic formulas to memorize?
|

Acceleration is rate of the change of the velocity vector with time. Average acceleration is change of velocity over change of time and it is uniformly accelerated motion along a straight line. In solving acceleration equations, we would be solving for average acceleration, because the only other type of acceleration is instantaneous acceleration, and you need calculus for that. You need to assign one direction as + and the opposite as -, and then keep this scheme for all your calculations.
For Cartesian coordinates, take upward and rightward motion as positive; down and left as negative. For free falls, take downward as positive. When working with acceleration problems, pay attention if the acceleration is uniform (constant). Constant acceleration means that you can solve for average velocity. Otherwise, you cannot use the average velocity equation (x = 1/2(vf + vi)t). |
|
|
|
What is instanteous speed and velocity?
|
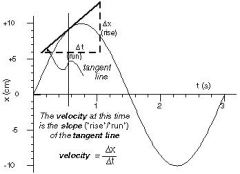
Instantaneous speed is the speed at an instant (infinitesimal time interval).
Instantaneous velocity is the velocity at an instant (infinitesimal time interval). Instantaneous speed equals the magnitude of instantaneous velocity. Instantaneous velocity has a direction, instantaneous speed does not. The direction of instantaneous velocity is tangent to the path at that point. By tangent, we mean that the line just touches the curve at one point. the tangent line can be thought of as a hill. The steeper it is, the larger is the velocity. The steepness is measured by the ratio of "rise"/"run". For our graph, the "rise" of the tangent line is a change in position and the "run" of the tangent line is the change in time. if the tangent line hill points upward (towards increasing x), then the velocity is positive. If the tangent line "hill" points downward (towards smaller x), then the velocity is negative. |
|
|
|
What how does air resistance affect free falling bodies and what is terminal velocity?
|
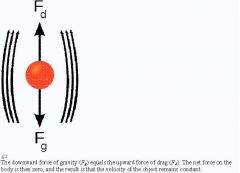
If you take air resistance into consideration, the acceleration is no longer constant for free falling bodies. As the air resistance is increased, the more massive object will strike the ground first. With enough air resistance the lighter ball is seen to reach a terminal velocity. A free-falling object achieves its terminal velocity when the downward force of gravity (Fg) equals the upward force of air resistance(Fd). This causes the net force on the object to be zero, resulting in an acceleration of zero. At this point the object ceases to accelerate altogether and continues falling at a constant speed called terminal velocity. Air resistance decreases the maximum height and decreases the range as well of projectiles. Air resistance increases with speed (velocity), surface area, shape, and air density, but NOT with greater masses of projectiles. Large surface area increases air resistance because it allows for more collisions with air molecules. Shape affects air resistance because streamlined objects with smooth surfaces experience less air resistance than irregularly shaped rough objects. The higher the velocity, the greater the air resistance. To calculate air resistance, you calculate the net force F = mg - force of air resistance. F = ma. If you calculate it at terminal velocity, then the net force F = 0, so the weight is equal to air resistance. Otherwise, you would need to calculate the net force F = ma, then set that equal to mg - force of air resistance. Air resistance is like friction - it is the force opposite to motion. So if something is flying horizontally, the air resistance is going to be the opposite direction of the horizontal motion. It's not always pointing up, it could be pointing left or right.
|
Greater mass won't change the force of air resistance, but will add inertia, which decreases the acceleration of the force of air resistance (because force of air resistance remains constant for any mass).This acceleration is not g, it is only the deceleration due to air resistance. Thus, larger masses experience less deceleration due to air resistance, because they are less affected by the same force of air resistance. Masses cancel out when you are setting up force equations (finding net force from force of gravity and force of acceleration). If you had to choose between a feather, an elephant, a toaster, and a bullet, the elephant would have the greatest force of air resistance not because of it's mass (even though it's the heaviest of the list), but because it has a greater amount of surface area.
|
|
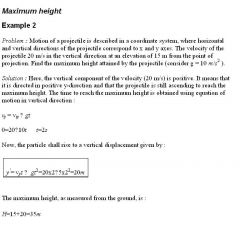
How do you solve a projectile question about long it spent in the time in the air or how far it travelled?
|

What is the time the projectile is in the air? Ans: use the vertical component only- calculate the time it takes for the projectile to reach the maximum height - this is when the vertical velocity is zero because this is terminal velocity. Then multiply this time by 2 because this is only half the flight time - the flight time up is equal to the flight time down.
•How far did the projectile travel? Ans: first get the time in the air by the vertical component. This time in the air is double the time found by the vertical velocity. Then multiply the horizontal component's speed by the time of flight. The horizontal component's speed does not change throughout the flight, so that is why we can multiply the time of flight by the horizontal speed to get the range. Understand that vertical velocity dictates time of flight. If 2 projectiles leave the earth with the same vertical velocity, they will land at the same time, regardless of their horizontal velocities. More massive objects fall faster (have greater velocity) than less massive objects due to air resistance because they are acted upon by a larger force of gravity; for this reason, they accelerate to higher speeds until the air resistance force equals the gravity force. |
For a projectile without air resistance, the range is maximized at 45°. Subtracting or adding to the angle of trajectory from 45° by equal amounts results in equal ranges. For instance, 30° and 60° are both 15° from 45° and result in the same range. The velocity of a projectile experiencing no air resistance is independent of mass. Height is maximized at 90°. Only VELOCITY changes at a constant rate with projectiles, not SPEED. As the projectile climbs, the speed of it decreases, as the projectile falls, the speed increases. For circular motion, speed is constant, but the velocity is constantly changing.
|
|
|
What is the centripetal acceleration of satellites orbiting in space?
|
Satellites orbiting the Earth are in free fall.
Their centripetal acceleration equals the acceleration from the Earth's gravity. Even though they are accelerating toward the Earth, they never crash into the Earth's surface because the Earth is round (the surface curves away from the satellite at the same rate as the satellite falls). |
|
|
|
What is circumference?
|
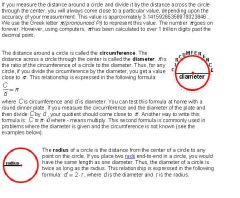
|
|
|
|
How do you find the arc of a circle?
|

|
|
|
|
How do you find the area of a sector of a circle?
|

|
|
|
|
What is uniform circular motion?
|
Uniform circular motion describes the motion of a body traversing a circular path at constant speed. The distance of the body from the axis of rotation remains constant at all times. Though the body's speed is constant, its velocity is not constant: velocity, a vector quantity, depends on both the body's speed and its direction of travel. This changing velocity indicates the presence of an acceleration; this centripetal acceleration is of constant magnitude and directed at all times towards the axis of rotation. This acceleration is, in turn, produced by a centripetal force which is also constant in magnitude and directed towards the axis of rotation. Because the velocity v is tangent to the circular path, no two velocities point in the same direction. Although the object has a constant speed, its direction is always changing. This change in velocity is caused by an acceleration a, whose magnitude is (like that of the velocity) held constant, but whose direction also is always changing. Acceleration is perpendicular to velocity.
|
|
|
|
How does weight change is someone is on an elevator accelerating up and down?
|
•You weigh more on an elevator accelerating up because F=mg + ma, where a is the acceleration of the elevator.
•An elevator accelerating up is the same thing as an elevator decelerating on its way down, in terms of the acceleration in F=mg + ma. •You weigh less on an elevator accelerating down because F=mg - ma, where a is the acceleration of the elevator. •An elevator accelerating down is the same thing as an elevator decelerating on its way up, in terms of the acceleration in F=mg - ma. |
|
|

What is weight equal to when someone is on a horizontal plane and an inclined plane?
|
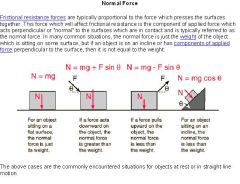
•When something is laying still on a horizontal surface, the normal force is equal and opposite to the weight.
•When something is laying still on an inclined plane, the normal force and friction force adds up in a vector fashion to equal the weight. When an object is sliding down an inclined plane, acceleration is constant (g) and in the downward direction. The horizontal velocity is also increasing, because acceleration has a component in the horizontal direction - which makes sense because a = v/t. If the object was sliding up the inclined plane, then acceleration would be decelerating, and horizontal velocity would be decreasing because acceleration acts in the downward direction, not upward direction. Remember, as long as there is friction, there is a normal force to calculate. And if there are applied forces, there is a normal force for each applied force. If there is an object on an inclined plane that is just sliding with no applied force, there is still a normal force perpendicular to that plane that corresponds with the force of gravity that's pulling that object down the plane. |
|
|

What is static friction?
|
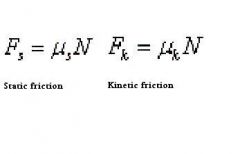
Static friction is friction between two solid objects that are not moving relative to each other. An object can sit still on an inclined plane because of static friction. •Static friction is always larger than kinetic friction. •The coefficient static friction is always larger than the coefficient of kinetic friction. The force of friction is always exerted in a direction that opposes movement (for kinetic friction) or potential movement (for static friction) between the two surfaces. If you have 3 objects with the same shape and material and masses 1kg, 2kg, and 3kg, on a board and the board is lifted on one end, all objects will slide at the same time (it's not dependent on the size of the object). Why? Because the maximum static frictional force occurs just before the block begins to move. At that moment, the block is in static equilibrium, so the net force is zero. That means the force up the plane equals the force down the plane. The force down the plane is mgsinθ. The force up the plane is static friction. Thus μmgcosθ = mgsinθ. So μ = sinθ/cosθ. θ is the angle at which any block will slide, it is independent of mass. Force is dependent on mass, inertia is dependent on mass. The angle of an incline, acceleration, distance the block travels, time the block takes, and speed that the block slides are not. Kinematic equations use acceleration, which is independent of mass. Pay attention to where the mass on an incline wants to move to or is moving to...if it's moving up an incline, then the force of friction is down the incline. If it's moving down the incline or wants to move down the incline (if it's being held stationary), then the force of friction is up the incline. The net force is the direction of force of friction (which could be up or down, opposite the motion) and the gravity component of the object (which is down), and any extra force applied (which could be up or down). Static friction has to be overcome to start an object moving. To determine if a block will move or not, set up an relationship to compare the parallel component of the weight of the block to the parallel component of static friction. So if Fmg > Fs, the block will slide. This is mgsinθ > μmgcosθ. If any value of μ is greater than the μ in this equation, the block will not move. If μ is smaller than this equation, then the block will move.
|
|
|
|
What is kinetic friction?
|
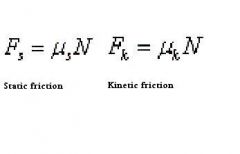
•Kinetic friction pertains to objects in motion. A key sliding across the table eventually comes to a stop because of kinetic friction. The coefficient of kinetic friction is typically denoted as μk, and is usually less than the coefficient of static friction for the same materials. Say we have a block tied to a string on a horizontal board with a weight over the end of the board that's constantly getting heavier. Then the block begins to slide on a board. How does it's speed vary (assume that kinetic friction and tension is constant in magnitude)? Because the coefficient of kinetic friction is smaller than the coefficient of static friction, there is a net accelerating force on the block once it begins to slide. The force of the kinetic friction overcame the force of the static friction force (because of the weight) to enable to the block to slide, so there is a difference in force applied. Since F = ma = kinetic force - static force, the constant force on the block is producing a constant acceleration. Since acceleration is constant (and positive because it's just beginning to slide and is not slowing down), the speed increases linearly with time (because velocity has a slope when acceleration is constant). If an object overcomes the static friction on an incline plane and begins to slide, then the net force (because the object now has a net force) is equal to the force down the plane (mgsinθ) - the frictional force (μmgcosθ). The mgsinθ value is the component of force down the plane, which would be the only force down the plane if the object wasn't pushed down, If the object was pushed down, then that would be the component of that force down the plane. If an object is sliding to a stop, then the net force is kinetic frictional force (μmgcosθ), so you equate that to F = ma to get the acceleration that it is decelerating.
|
|
|
|
How are the forces affected on an inclined plane if an object is going down at constant velocity, an object begins to slip, an object accelerates down, and an object is pushed up?
|
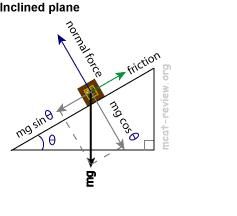
•In an object going down the inclined plane at constant velocity: parallel component of gravity = kinetic friction (yes, they're equal, don't make the mistake of thinking it's larger. Constant velocity = no acceleration = no net force).
•In an object that begins to slip on the inclined plane: parallel component of gravity > static friction. •In an object that accelerates down the inclined plane: parallel component of gravity > kinetic friction. •When you push an object up an inclined plane, you need to overcome both the parallel component of gravity and friction. •When you push or pull an object up an inclined plane, make sure you divide that force into its components. Only the component parallel to the plane contributes to the motion. |
|
|
|
What is the unit circle?
|

|
|
|
|
What are the sine and cosine, and tangent 30°?
|
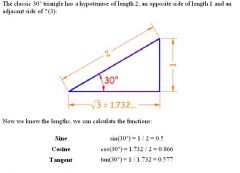
|
|
|
|
What are the sine, cosine, and tangent of 45°?
|

|
|
|
|
How do you convert between degrees and radians?
|

|
|
|

If force and distance are applied in the same, opposite, and perpendicular directions, what is the resulting work done?
|
If the force and the distance applied is in the same direction, work is positive. ◦For example, pushing a crate across a rough terrain involves you doing positive work (you are pushing forward and the crate is moving forward). ◦If the force and the distance applied is in opposite directions, work is negative. ◦Friction always does negative work because frictional forces always act against the direction of motion. ◦If the force is acting in one direction, but the object moves in a perpendicular direction, then no work is done. ◦The classic example is that no work is done by your arms when you carry a bucket of water for a mile. Because you are lifting the bucket vertically while the displacement of the motion is forward.
If there are external forces acting on an object, then work DOES NOT equal only the change in kinetic energy, work equals the total change in mechanical energy (change in kinetic energy and change in potential energy). So if you have a problem where there is potential energy and kinetic energy is involved, both of those changes equal the work if there is an external force (like frictional forces, any non-conservative force). |
|
|
|
What are non-conservative forces?
|
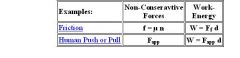
◦Non-conservative include frictional forces and human exertion. When friction acts on an object, the heat and sound released cannot be recovered. When you flex your arm, you lose heat that cannot be recovered (you cannot re-absorb the heat you lost). The work done by a Nonconservative Force is not recoverable or expressible symbolically as a potential energy term. Energy in general is always conserved - this is a universal law. Frictional forces do not conserve MECHANICAL energy (KE + PE). Energy transfers that result in temperature changes (like due to frictional forces) are not necessarily equal between the objects that come in contact. Whenever work is done upon an object by an external force, there will be a change in the total mechanical energy of the object.
|
Except for frictional forces, the work done by all nonconservative forces equals the change in the mechanical energy of the systems upon which they are applied. This result is described by the equation: W = ΔK + ΔU. Conservative forces don't do work.
Kinetic frictional forces increase the internal energy of the systems to which they are applied. Thus, the entire amount of work done by such a force does not go into changing the mechanical energy, as they do with other non-conservative forces. Work done AGAINST friction is FdcosΘ. The work done BY friction is not FdcosΘ because frictional forces change the internal energy. The work done BY friction changes the kinetic energy (negatively) and the internal energy (positively) of other objects, so W = ΔK + ΔU + ΔEi |
|
|
What is vapor pressure?
|
The vapor pressure of a liquid is the equilibrium pressure of a vapor above its liquid (or solid); that is, the pressure of the vapor resulting from evaporation of a liquid (or solid) above a sample of the liquid (or solid) in a closed container. As the temperature of a liquid or solid increases its vapor pressure also increases. Conversely, vapor pressure decreases as the temperature decreases. The pressure exerted by the gas in equilibrium with a solid or liquid in a closed container at a given temperature is called the vapor pressure. When a solid or a liquid evaporates to a gas in a closed container, the molecules cannot escape. Some of the gas molecules will eventually strike the condensed phase and condense back into it. When the rate of condensation of the gas becomes equal to the rate of evaporation of the liquid or solid, the amount of gas, liquid and/or solid no longer changes. The gas in the container is in equilibrium with the liquid or solid.
|
|
|
|
What is the definition of rate constant?
|
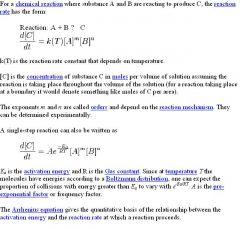
In chemical kinetics a reaction rate constant k quantifies the speed of a chemical reaction.
|
|
|
|
For the rate law equation, are the coefficients in front of the concentrations of the reactants always determined stochiometrically?
|

|
|
|
|
What are the energies of a spring?
|
The total mechanical energy of a mass m, on a spring, when no other forces do work, is given by the sum of the kinetic and potential energies. E = 1/2 mv^2 + 1/2 kx^2. Potential energy = PE = ½kx^2. Kinetic energy = KE = ½mv^2. At the equilibrium position x = 0, PE = 0, KE = maximum. At the maximum displacement (amplitude) x = A, PE = maximum, KE = 0. It is easy to evaluate E in terms of the amplitude A of the motion, because v = 0 when x is at its maximum value of A and E = 1/2 kA^2 because there is no KE. At any point, PE + KE = maximum PE = maximum KE = constant. Maximum PE = 1/2kA^2 = maximum KE = 1/2m(vmax)^2. If you are given the velocity at the equilibrium position, then you should be able to find out the amplitude by setting maximum KE = maximum PE. If you are given the amplitude, then you should be able to find out the velocity at the equilibrium position by setting maximum PE = maximum KE.
|
|
|
|
What are interesting properties of pendulums concerning its frequency?
|
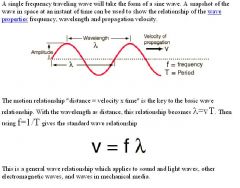
The frequency of the pendulum is dependent on the length of the string or wire. The shorter the wire, the greater the frequency or how fast it goes back and forth. The frequency is independent of the amplitude of the swing, provided the initial angle is not large. At larger angles, there is a slight change in the frequency. Also, the frequency is independent of the mass of the bob. In other words a pendulum with a heavy bob will move at the same rate as one with a lighter weight bob. But this only makes sense, since the acceleration of gravity on a falling object is independent of the mass of the object. Note that the velocity, as well as the period and frequency are affected by the acceleration due to gravity constant. In other words, a pendulum will swing slower on the Moon than on the Earth, because the gravity on the Moon is less than on the Earth.
|
|
|
|
Why is it that At any point, PE + KE = maximum PE = maximum KE = constant for general periodic motion (simple harmonic and pendulums)?
|
A simple pendulum is an example of simple harmonic motion. It contiunes swinging back and forth. During this swinging, there is constant exchange between potential and kinetic energy. When a pendulum is the farthest up in its swing, it is at its maximum height which gives it maximum potential energy. At this same point in the swing, the pendulum is motionless for a fraction of a second because it is changing direction. Since the speed is zero, the kinetic energy is also zero. After the pendulum changes direction and begins swinging again, it is losing height, but gaining speed. This also means that the pendulum is losing potential energy, but gaining kinetic energy. When the pendulum reaches the very bottom of the swing, it is at its lowest point and greatest speed. This means that the pendulum has zero potential energy (with respect to its rest position) and maximum kinetic energy. This pattern continues for the rest of the swings. Ignoring air resistance, the total energy of the system (P.E. + K.E) should be the same at every position in the swing.
|
|
|
|
What is the velocity and amplitude of general periodic motion?
|
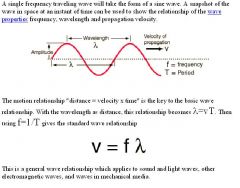
Amplitude (A) is the maximum displacement from equilibrium, not the total swing. Velocity is frequency * wavelength.
|
|
|
|
What are transverse waves?
|
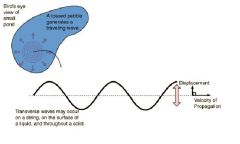
For transverse waves the displacement of the medium is perpendicular to the direction of propagation of the wave. So the displacement is up and down, but the velocity (propogation) of the wave is to the left or right. A ripple on a pond and a wave on a string are easily visualized transverse waves. Light, sound through solids and Electromagnetic radiation are other examples. Transverse waves cannot propagate in a gas or a liquid because there is no mechanism for driving motion perpendicular to the propagation of the wave. When work is done on the surface to disturb its level, a transverse wave is produced.
|
|
|
|
What are longitudinal waves?
|
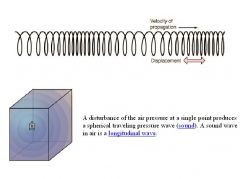
In longitudinal waves the displacement of the medium is parallel to the propagation of the wave. So the displacement is left and right and the propagation (velocity) of the wave is left and right. A wave in a "slinky" is a good visualization because the slinky moves to the left and right and that is also how the velocity of the slinky is moving - meaning everything is moving in a parallel direction. Sound waves in air are longitudinal waves. Pressure waves and earthquakes are other examples.
|
|
|
|
What are standing waves?
|
A standing wave, also known as a stationary wave, is a wave that remains in a constant position. This phenomenon can occur because the medium is moving in the opposite direction to the wave, or it can arise in a stationary medium as a result of interference between two waves traveling in opposite directions. In the second case, for waves of equal amplitude traveling in opposing directions, there is on average no net propagation of energy. The sum of two counter-propagating waves (of equal amplitude and frequency) creates a standing wave. Standing waves commonly arise when a boundary blocks further propagation of the wave, thus causing wave reflection, and therefore introducing a counter-propagating wave. For example when a violin string is displaced, longitudinal waves propagate out to where the string is held in place at the bridge and the "nut", whereupon the waves are reflected back. At the bridge and nut, the two opposed waves are in antiphase and cancel each other, producing a node. Halfway between two nodes there is an antinode, where the two counter-propagating waves enhance each other maximally. There is on average no net propagation of energy.
|
|
|
|
What is the speed of a standing wave?
|

A vibration in a string is a wave. Vibrations are standing waves in a string. Tense, light strings can produce faster standing waves.
|
|
|
|
What is the fundamental frequency on a string?
|
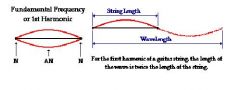
The resonance of strings produces the fundamental frequency and harmonics. Because the ends of the string are attached and fixed in place to the guitar's structure, the ends of the string are unable to move. Subsequently, these ends become nodes - points of no displacement. In between these two nodes at the end of the string, there must be at least one antinode. The most fundamental harmonic for a guitar string is the harmonic associated with a standing wave having only one antinode positioned between the two nodes on the end of the string. This would be the harmonic with the longest wavelength and the lowest frequency. The lowest frequency produced is known as the fundamental frequency. The fundamental frequency is also called the first harmonic. If you analyze the wave pattern in the string for this harmonic, you will notice that there is not quite one complete wave within the pattern. In this pattern, there is only one-half of a wave within the length of the string. This is the case for the first harmonic or fundamental frequency of a string.
|
|
|
|
What is a complete wave?
|
A complete wave starts at the rest position, rises to a crest, returns to rest, drops to a trough, and finally returns to the rest position before starting its next cycle. (Caution: the use of the words crest and trough to describe the pattern are only used to help identify the length of a repeating wave cycle. A standing wave pattern is not actually a wave, but rather a pattern of a wave. Thus, it does not consists of crests and troughs, but rather nodes and antinodes. The pattern is the result of the interference of two waves to produce these nodes and antinodes.)
|
For a simple SINE function, the wavelength can be measured from trough to trough or peak to peak. HOWEVER, this is not always the case! For any other function, a wavelength is measured from any point, to the next point where the function begins to repeat itself. Wavelength has units of meters.
|
|
|
What is the second harmonic of a string?
|
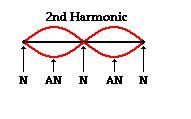
The second harmonic of a guitar string is produced by adding one more node between the ends of the guitar string. And of course, if a node is added to the pattern, then an antinode must be added as well in order to maintain an alternating pattern of nodes and antinodes. In order to create a regular and repeating pattern, that node must be located midway between the ends of the guitar string. This additional node gives the second harmonic a total of three nodes and two antinodes. The standing wave pattern for the second harmonic is shown at the right. A careful investigation of the pattern reveals that there is exactly one full wave within the length of the guitar string. For this reason, the length of the string is equal to the length of the wave.
|
|
|
|
What is the third harmonic of a string?
|
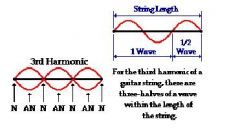
The third harmonic of a guitar string is produced by adding two nodes between the ends of the guitar string. And of course, if two nodes are added to the pattern, then two antinodes must be added as well in order to maintain an alternating pattern of nodes and antinodes. In order to create a regular and repeating pattern for this harmonic, the two additional nodes must be evenly spaced between the ends of the guitar string. This places them at the one-third mark and the two-thirds mark along the string. These additional nodes give the third harmonic a total of four nodes and three antinodes. The standing wave pattern for the third harmonic is shown at the right. A careful investigation of the pattern reveals that there is more than one full wave within the length of the guitar string. In fact, there are three-halves of a wave within the length of the guitar string. For this reason, the length of the string is equal to three-halves the length of the wave. The diagram below depicts this length-wavelength relationship for the fundamental frequency of a guitar string.
|
|
|
|
What is the relationship of standing wave patterns for strings?
|
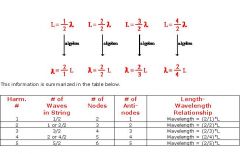
Each harmonic results in an additional node and antinode, and an additional half of a wave within the string.
|
|
|
|
What are the resonance frequencies of closed and open tubes?
|
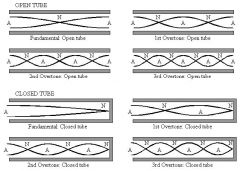
For an open tube (a tube open at both ends) or a closed tube at both ends, resonance occurs when the wavelength of the wave (λ) satisfies the condition:
λ = 2L/n, where n = 1, 2, 3, 4,…. n is the harmonic (1st, 2nd, etc). where L = tube length. For a tube that is open at one end and closed at the other, resonance occurs when the wavelength of the wave (λ) satisfies the condition: λ = 4L/n where n = 1, 3, 5, 7, 9,…. There are no even harmonics for pipes open at one end and closed at the other. n is the harmonic (1st, 3rd, 5th, etc). Wavelengths are divided into 4 parts and you count each part for the length. An open pipe has its fundamental, resonant wavelength at twice the length of the pipe. Both ends have displacement antinodes (maximum amplitudes) with a node in the middle of the pipe. Thus, an open pipe is half a wavelength long. The resonant wavelength is independent of the diameter of the pipe, but it depends on the length. |
Notice when one end is an antinode (pipes with one open end and one closed end), the even numbered harmonics are missing. Why? There is no second harmonic for a closed-end air column. The next frequency above the fundamental frequency is the third harmonic (three times the frequency of the fundamental).
|
|
|
What are beat frequencies?
|
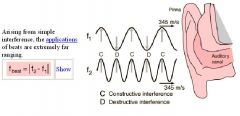
◦Beats occur when two waves coexist at different frequencies.
◦The beat frequency is the difference between the frequencies of the two waves. When two sound waves of different frequency approach your ear, the alternating constructive and destructive interference causes the sound to be alternatively soft and loud - a phenomenon which is called "beating" or producing beats. The beat frequency is equal to the absolute value of the difference in frequency of the two waves. A special case of superposition of waves is the phenomenon known as beats. Beats occur when two waves with slightly different frequencies are superimposed. At some points they will be nearly in phase and experience constructive interference. At other points they will be out of phase and experience destructive interference. These points will alternate with a frequency equal to the difference between the frequencies of the original two waves. This difference is called the beat frequency. |
|
|
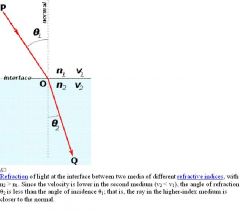
What is Snell's law?
|

Snell's law is a formula used to describe the relationship between the angles of INCIDENCE and REFRACTION, when referring to light or other waves passing through a boundary between two different isotropic media, such as water and glass. The law says that the ratio of the sines of the angles of incidence and of refraction is a constant that depends on the media. Snell's law doesn't relate incidence and reflection, it relates incidence and refraction. The refractive index of a medium is a measure of how much the velocity of a wave is reduced inside that medium. For example, typical soda-lime glass has a refractive index close to 1.5, which means that in glass, light travels at 1 / 1.5 = 2/3 the speed of light in a vacuum.
The angle of incidence is equal to the angle of refraction. You can remember this because the collision of photons against the interface is completely elastic, the photons lose no kinetic energy. |
|
|

Why can sound travel in solids as transverse and longitudinal waves?
|
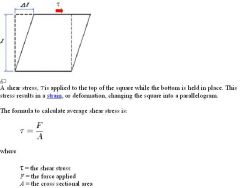
In solids, there occurs the possibility of two different types of sound waves: one type, longitudinal waves, is associated with compression (the same as all sound waves in fluids and gases) and the other, transverse waves, is associated with shear stresses, which cannot occur in fluids. The speed of compression-type waves in all media is set by the medium's compressibility and density, and the speed of shear waves in solids is set by the material's stiffness, compressibility and density. A shear stress, denoted (tau), is defined as a stress which is applied parallel or tangential to a face of a material, as opposed to a normal stress which is applied perpendicularly. Longitudinal (or compression) waves are waves that have the same direction of oscillation or vibration along their direction of travel, which means that the oscillation of the medium (particle) is in the same direction or opposite direction as the motion of the wave. Longitudinal sound waves are waves of alternating pressure deviations from the equilibrium pressure, causing local regions of compression in the same direction of travel. Transverse waves (in solids) are waves of alternating shear stress at right angle to the direction of propagation.
|
|
|
|
Why are decibels are good unit for sound intensity?
|

The factor of 10 multiplying the logarithm makes it decibels instead of Bels, and is included because about 1 decibel is the just noticeable difference (JND) in sound intensity for the normal human ear. Beta is the sound level and it is measured in decibels. Decibels provide a relative measure of sound intensity. The unit is based on powers of 10 to give a manageable range of numbers to encompass the wide range of the human hearing response, from the standard threshold of hearing at 1000 Hz to the threshold of pain at some ten trillion times that intensity.
Another consideration which prompts the use of powers of 10 for sound measurement is the rule of thumb for loudness: it takes about 10 times the intensity to sound twice as loud. To use logs, ask, "To what number do I raise 10 to produce that number?" The log(10^x) = x. So, the log(100) = 2. The log takes something that's going up geometrically (exponentially), and makes it linear. The log(3) = 1/2, because the square root of 10 is about 3, so if we raise 10^1/2, then the log(3) = 1/2 and log(10^1/2) = 1/2. Also, log(ab) = log(a) + log(b). The log(30) = log(10) + log(3) = 1 + 1/2. = 1.5. The log(2) is about 0.3. Say that the beginning decibels is 120dB, and double the amplifiers is added, what is the loudness in dB after? Well, the original equation is B = 10log(I/I0). The intensity doubled because of the amplifiers, so the new expression is B = 10log(2*I/I0). Then we break up the log and say 10log(2) + 10log(I/I0). 10log(I/I0) is equal to 120dB. log(2) is about .3 and 10 times that is about 3. So the new number of decibels is 120dB + 3dB = 123 dB. You don't just double 120dB. That is not how our hearing works, our hearing registers in logs. |
|
|

What is the Doppler Effect?
|

The Doppler effect is the change in frequency of a wave for an observer moving relative to the source of the wave. It is commonly heard when a vehicle sounding a siren or horn approaches, passes, and recedes from an observer. The received frequency is higher (compared to the emitted frequency) during the approach, it is identical at the instant of passing by, and it is lower during the recession. The frequency of the sounds that the source emits does not actually change. Consider this: Someone throws one ball every second in a man's direction. Assume that balls travel with constant velocity. If the thrower is stationary, the man will receive one ball every second. However, if the thrower is moving towards the man, he will receive balls more frequently because the balls will be less spaced out. The inverse is true if the thrower is moving away from the man. So it is actually the wavelength which is affected; as a consequence, the received frequency is also affected. It may also be said that the velocity of the wave remains constant whereas wavelength changes; hence frequency also changes. The frequency is decreased if either the source or observer or both are moving away from the other. If both are moving at the same time, utilize both the denominator and the numerator of the equation. If the source and the receiver are side by side, then there is no frequency shift. Say for example a receiver is in a jet flying alongside another jet that is emitting radio waves. If the jets fly at the same velocity, the change in frequency detected at the receiver is 0 Hz. It is f' = f((v +/- vo))/v +/- vs). vo is the speed of the observer (aka the detector) and vs is the speed of the source. v is the speed of sound in the medium. f' is the observed frequency. f is the source frequency. If the observer is moving away from source, that decreases the observed frequency, so use negative sign. If observer is moving toward source, then use positive sign because it's increasing the observed frequency. If the observer stationary, then vo is 0, if the source is stationary, then vs is 0.
|
The Doppler effect results because waves are unaffected by the speed of the source which produces them. If the source moves relative to the receiver of the waves (here called 'the observer'), each wave will travel a different distance in order to reach the observer, and therefore the observer will not receive them at the
same frequency as they were emitted. If we are talking about sound waves, where pitch changes with frequency, the observer would not hear the same pitch that the source emitted. With light, the observer would not observe the same color that was emitted. Relative velocity is the net speed - when the objects are moving in same direction, you subtract because (+V1-(+V2). When objects are moving in different directions, you add because (+V1- (-V2)) = (+V1 + V2). Velocity is a vector - have to pay attention to direction. |
|
|
How is Reynolds number related to turbulence with high velocities?
|
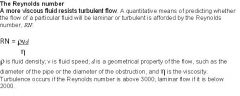
Turbulence does not begin to occur until the velocity of flow becomes high enough that the flow lamina break apart. Therefore, as blood flow velocity increases in a blood vessel or across a heart valve, there is not a gradual increase in turbulence. Instead, turbulence occurs when a critical Reynolds number (Re) is exceeded. Reynolds number is a way to predict under ideal conditions when turbulence will occur. Re increases as velocity increases and decreases as viscosity increases. Therefore, high velocities and low viscosity are more likely to cause turbulence. It makes sense that Re decreases as viscosity increases because think about it, how turbulent is honey? It's too thick to be turbulent. But water can be turbulent.
|
|
|

What is the definition of stress and strain of solids?
|
Both fluids and solids resist compression with similar strength, although solids are generally less compressible. Solids are much more resistant to stretching than liquids. The idea of pressure remains useful in studying solids. It is renamed "stress" and (unlike pressure for fluids) its sign is now taken to be negative if the stress tends to reduce the volume of a sample. It still has units of Newtons per square meter, or Pascals. We can also talk of the compression force per unit area, i.e. the pressure. P = F/A. Sometimes stress is given the code σ . Strain is the extent to which a body is distorted when a deforming force (stress) is applied to it. It is a ratio of the strain is the ratio of the change in length of a body to its original length: ε = strain = ΔL/L0. ε denotes strain. Elastically – When an applied stress is removed, the material returns to its undeformed state. Linearly elastic materials, those that deform proportionally to the applied load, can be described by the linear elasticity equations such as Hooke's law (F=kx).
|
|
|
|
What is Young's Modulus?
|
In solid mechanics, Young's modulus (E) is a measure of the stiffness of an elastic material. It is defined as the ratio of the stress over the strain. Young's modulus is the ratio of stress, which has units of pressure, to strain, which is dimensionless; therefore Young's modulus itself has units of pressure. The SI unit of modulus of elasticity (E) is the pascal. It can be used to predict the amount a wire will extend under tension or buckle under compression.
|
|
|
|
When do current carrying wires repel each other in a magnetic field?
|

|
|
|
|
When do current carrying wires attract to each other in a magnetic field?
|
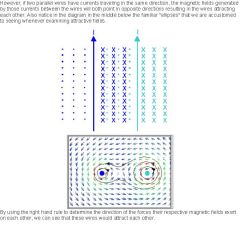
|
|
|
|
How do you do do vector subtraction?
|
Add a negative vector. Do the head to tail method.
|
|
|
|
What is a dot product?
|
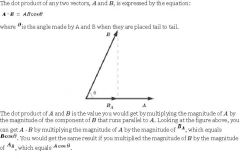
The dot product, also called the scalar product, takes two vectors, “multiplies” them together, and produces a scalar. The smaller the angle between the two vectors, the greater their dot product will be. A common example of the dot product in action is the formula for work. Work is a scalar quantity, but it is measured by the magnitude of force and displacement, both vector quantities, and the degree to which the force and displacement are parallel to one another. Note that the dot product of two identical vectors is their magnitude squared, and that the dot product of two perpendicular vectors is zero.
|
|
|
|
What is the cross product?
|

The cross product, also called the vector product, “multiplies” two vectors together to produce a third vector, which is perpendicular to both of the original vectors. The closer the angle between the two vectors is to the perpendicular, the greater the cross product will be. We encounter the cross product a great deal in our discussions of magnetic fields. Magnetic force acts perpendicular both to the magnetic field that produces the force, and to the charged particles experiencing the force.
|
|
|
|
What is the right hand rule?
|
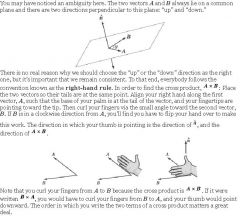
|
|
|
|
What is the electric field strength equation in terms of E?
|
Electric field strength is a vector quantity; it has both magnitude and direction. The magnitude of the electric field strength is defined in terms of how it is measured. Let's suppose that an electric charge can be denoted by the symbol Q. This electric charge creates an electric field; since Q is the source of the electric field, we will refer to it as the source charge. The strength of the source charge's electric field could be measured by any other charge placed somewhere in its surroundings. The charge that is used to measure the electric field strength is referred to as a test charge since it is used to test the field strength. The test charge has a quantity of charge denoted by the symbol q. When placed within the electric field, the test charge will experience an electric force - either attractive or repulsive. As is usually the case, this force will be denoted by the symbol F. The electric force between two charges is derived from Coulomb's Law and is: F = k*q*Q/r^2, in terms of the test charge and source charge. The electric field is defined as the force per charge on the test charge, or E = F/q. If we use both equations, we get E = k*Q/r^2. The electric field strength is dependent upon the quantity of charge on the source charge (Q) and the distance of separation (r) from the source charge. A charge particle accelerates in an electric field. The force of an electric field is found by F = E/q and E = kq/r^2. Whenever an electric field is constant, as it is with parallel plate capacitors, it's easy to find force because you use that constant and divide by the charge of whatever you're studying. Remember, the electric field always points in the direction of a positive charge.
|
An electric field is defined as the electrostatic force per unit charge. The symbol for any electric field is E. E is a vector pointing in the direction of the field and has units of N/C or V/m. For a point charge, the electric field is found by dividing Coulomb's law by q giving: E = kq1/(r^2).
The electric field for a system of point charges is found by summing the fields due to each charge. Remember that E is a vector and you must use vector addition when summing fields. |
|
|
What is a field force?
|
The concept of a field force is utilized to explain this rather unusual force phenomenon that occurs in the absence of physical contact. While all masses attract when held some distance apart, charges can either repel or attract when held some distance apart. A charged object creates an electric field - an alteration of the space in the region which surrounds it. Other charges in that field would feel the unusual alteration of the space. Whether a charged object enters that space or not, the electric field exists. Gravitational forces is also a field, a gravitational field. Every mass in a gravitational field experiences the same acceleration due to gravity. Acceleration due to gravity is a gravitational field. The acceleration due to gravity is a constant. Electric fields and gravitational fields differ in reference to MASS. Electric fields do not take into account mass (E = kq/r^2, while g = kM/r^2). So, even though the electric force can be the same for 2 particles at the same distance, the acceleration for those two particles will be different because acceleration takes into account mass (F of electric field = ma). However, in gravitational fields, acceleration is the same for all objects because the mass cancels out from the gravitational force equation and the F= ma equation. Also, the momentum will be different (because momentum depends on mass). Mass resists change in velocity (inertia). The path that a particle takes in an electric field depends on both the charge and the mass, even if they have the same velocity.
|
|
|
|
What does the density of field lines around a charged object reveal?
|
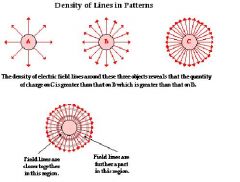
One common convention is to surround more charged objects by more lines. Objects with greater charge create stronger electric fields. By surrounding a highly charged object with more lines, one can communicate the strength of an electric field in the space surrounding a charged object by the line density. Not only does the density of lines surrounding any given object reveal information about the quantity of charge on the source charge, the density of lines at a specific location in space reveals information about the strength of the field at that location. Consider the object shown at the bottom. Two different circular cross-sections are drawn at different distances from the source charge. These cross-sections represent regions of space closer to and further from the source charge. The field lines are closer together in the regions of space closest to the charge; and they are spread further apart in the regions of space furthest from the charge. Based on the convention concerning line density, one would reason that the electric field is greatest at locations closest to the surface of the charge and least at locations further from the surface of the charge. Line density in an electric field line pattern reveals information about the strength or magnitude of an electric field.
|
|
|
|
What are other equal and unequal charge configurations of electric fields?
|

In the top diagrams, the individual source charges in the configuration possess the same amount of charge. Having an identical quantity of charge, each source charge has an equal ability to alter the space surrounding it. Subsequently, the pattern is symmetrical in nature and the number of lines emanating from a source charge or extending towards a source charge are the same. This is because the density of lines surrounding any given source charge is proportional to the quantity of charge on that source charge. If the quantity of charge on a source charge is not identical, the pattern will take on an asymmetric nature as one of the source charges will have a greater ability to alter the electrical nature of the surrounding space. This is depicted bottom diagram.
|
|
|
|
What are the principles of electric field lines?
|
•Electric field lines always extend from a positively charged object to a negatively charged object, from a positively charged object to infinity, or from infinity to a negatively charged object.
•Electric field lines never cross each other. •Electric field lines are most dense around objects with the greatest amount of charge. •At locations where electric field lines meet the surface of an object, the lines are perpendicular to the surface. This means that the field lines are not straight up and down, through the object they point perpendicularly out or toward the object. |
|
|

How are force and potential energy related?
|

Force and potential energy are directly related. As an object moves in the direction that the force accelerates it, its potential energy decreases. For example, the gravitational potential energy of a cannonball at the top of a hill is greater than at the base of the hill. As the object falls, that potential energy decreases and is translated to motion, or inertial (kinetic) energy.
For certain forces, it is possible to define the "potential" of a field such that the potential energy of an object due to a field is dependent only on the position of the object with respect to the field. Those forces must affect objects depending only on the intrinsic properties of the object and the position of the object, and obey certain other mathematical rules. Two such forces are the gravitational force (gravity) and the electric force in the absence of time-varying magnetic fields. The potential of an electric field is called the electric potential. |
|
|
|
What are equipotential lines for dipoles, constant fields, and point charges?
|

Equipotential lines are like contour lines on a map which trace lines of equal altitude. In this case the "altitude" is electric potential or voltage. Equipotential lines are always perpendicular to the electric field. In three dimensions, the lines form equipotential surfaces. Movement along an equipotential surface requires no work because such movement is always perpendicular to the electric field.
|
|
|
|
What are electric dipole moments?
|

It requires a lot of energy to produce a net charge, so most objects do not have a net charge. All objects however contain charge and often the centers of positive and negative charge in an object are at different locations. The behavior and shape of the electric field of these charges is determined by their electric dipole moment. Any electric field can be expressed as a series of characteristic fields whose strength is determined by their “moment”. The electric dipole moment for a pair of opposite charges of magnitude q is defined as the magnitude of the charge times the distance between them and the dipole moment vector points from the
center of the negative charge to the center of the positive charge, p = qd. The strength of the dipole, the size of |p|, increases with the amount of charge separated, q, and the amount of separation, d. |
|
|
|
How is potential energy and torque related to dipoles?
|
Dipole has minimum potential energy when aligned with the field, and also remember that a dipole in a uniform field experiences a torque (t=pE).
Thus, if the dipole can fritter away its potential energy, the torque will align the dipole in the direction of the external field, and bringing its potential to a minimum. The torque, τ , on an electric dipole with dipole moment vector p in an electric field E is τ = pE sin θ where θ is measured from p to E. A positive torque causes a counterclockwise angular acceleration. |
|
|
|
What are the general properties shared by all forms of electromagnetic radiation?
|
1) It can travel through empty space. Other types of waves need some sort of medium to move through: water waves need liquid water and sound waves need some gas, liquid, or solid material to be heard
2) The speed of light is constant in space. All forms of light have the same speed of 299,800 kilometers/second in space (often abbreviated as c). From highest energy to lowest energy the forms of light are Gamma rays, X-rays, Ultraviolet, Visible, Infrared, Radio. (Microwaves are high-energy radio waves.) 3) A wavelength of light is defined similarly to that of water waves---distance between crests or between troughs. The abbreviation used for wavelength is the greek letter lambda. |
|
|
|
What is the energy supplied to a circuit by a battery?
|
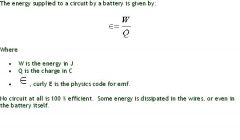
A good working definition of emf is the open circuit terminal voltage of the battery, i.e. when there is no current flowing.
If a problem does not reference an internal resistance due to the motor or generator, assume that the voltage is the ideal terminal potential voltage (which is considered emf). The internal resistance is different from the resistors of the circuit, it is the internal resistance of the motor or generator itself that takes away from the emf (terminal potentials), and the voltage as a result is the usable voltage for the circuit. Realize that the internal resistance is usually a really small number and it is fixed, it's a lot smaller than what the resistors of a circuit are usually. |
|
|
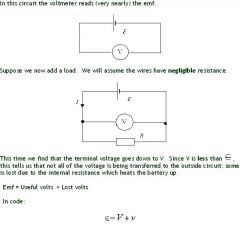
What is a voltmeter?
|
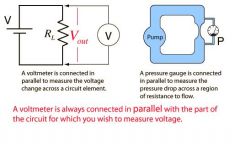
A voltmeter measures the change in voltage between two points in an electric circuit and therefore must be connected in parallel with the portion of the circuit on which the measurement is made. In analogy with a water circuit, a voltmeter is like a meter designed to measure pressure difference. It is necessary for the voltmeter to have a very high resistance so that it does not have an appreciable affect on the current or voltage associated with the measured circuit. Suppose we connect a cell to a high resistance voltmeter. (A perfect voltmeter has infinite resistance. A digital multimeter has a very high resistance, so gives out a tiny current; it is almost perfect.
|
|
|
|
How do you solve problems with internal resistance?
|

|
|
|
|
What is electromotive force?
|

Electromotive force is the voltage across the terminals WHEN NO CURRENT IS FLOWING.
|
|
|
|
What is capacitance?
|
Capacitance is the ability of a body to hold and store an electrical charge. It stores it in the form of separated charge. Capacitance is also a measure of the amount of electrical energy stored (or separated) for a given electric potential. A common form of energy storage device is a parallel-plate capacitor. In a parallel plate capacitor, capacitance is directly proportional to the surface area of the conductor plates and inversely proportional to the separation distance between the plates. If the charges on the plates are +Q and −Q, and V gives the voltage between the plates, then the capacitance is given by C = Q/V. The SI unit of capacitance is the farad; 1 farad is 1 coulomb per volt. The energy (measured in joules) stored in a capacitor is equal to the work done to charge it. The capacitance can be calculated if the geometry of the conductors and the dielectric properties of the insulator between the conductors are known. For example, the capacitance of a parallel-plate capacitor constructed of two parallel plates both of area A separated by a distance d is approximately equal to the following: C = εA/d, where ε is a constant, A is the area of overlap of the two plates, and d is the separation between the plates. Capacitance is proportional to the area of overlap and inversely proportional to the separation between conducting sheets. The closer the sheets are to each other, the greater the capacitance.
|
|
|
|
What is the electric field of a parallel plate capacitor?
|
When two plate of different charge are placed near each other, the two E-fields between the plates add while the E-field outside the plate cancel. When the plates are close to each other to form a capacitor, the E-field between the plates is constant through out the interior of the capacitor as long as one is not near the edges of the plates. Since the E-field is constant inside a capacitor, the magnitude of the Electric field has a very simple relation to the voltage between the plates and their separation d: E = V/d. This relationship is also true in an electrical wire were V is the voltage across the ends of the wire and d is the length of the wire. C = Q/V = εA/d. This equation for the capacitance of a parallel capacitor shows that C is a constant independent of the charge stored in on the plates or the voltage across the capacitor. By placing a thin insulating material (a dielectric) between the plates the separation d can be reduced thus increasing the capacitance of the capacitor and prevent the plates from touching. It takes more voltage to store the same amount of charge on a capacitor because of the presence of the dielectric. Typically a dielectric contains polar molecules which partially line up in the presence of the electric field. The dielectric creates an E-field in the opposite direction which reduces the overall E-field between the plates. The force of the electric field is also equal to F = E/q. V = Eq/r, where E is the electric field and you are just interested in the voltage near a point charge. Also, V = Eq[1/rB-1/rA] if you are interested in the voltages between two positions, where B and A are the two positions.
|
|
|
|
What is C for capacitors in series?
|
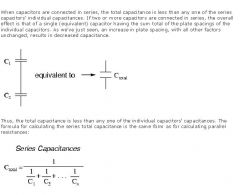
Connecting them in series, we note that the effective spacing between the end plates is equal to the sum of the spacings of the individual capacitors. This applies to any number of such capacitors in series. The spacing between 2 different capacitors will add up together to get the overall spacing of the overall capacitance. Since the capacitance of any capacitor is inversely proportional to the distance between the plates, we can express the total capacitance, CT, of any number of capacitors connected in series as: 1/CT = 1/C1 + 1/C2 + 1/C3 + ...
|
|
|
|
What is C for parallel capacitors?
|
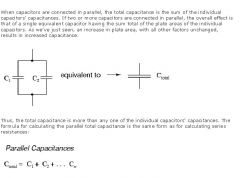
C = εA/d. Increases in plate area (A) increases capacitance. As you will no doubt notice, this is exactly opposite of the phenomenon exhibited by resistors. With resistors, series connections result in additive values while parallel connections result in diminished values. With capacitors, its the reverse: parallel connections result in additive values while series connections result in diminished values. Capacitances diminish in series. Capacitances add in parallel.
When we connect two capacitors in parallel, as with resistors in parallel, the same source voltage is applied to each capacitor. When this is done with capacitors, each capacitor charges to the same voltage, without regard to the behavior of the other capacitor. Logically, then, it would seem that the total capacitance would simply be the sum of the capacitance values of the individual capacitors connected in parallel. This is in fact the case, and the equation to determine the total capacitance, CT, of any number of capacitors in parallel is: C total = C1 + C2 + C3+...In essence, by connecting capacitors in parallel we have increased the surface area of the plates without changing the distance between them. If we do this with two identical capacitors, we effectively double the surface area of the plates while leaving the spacing between them unchanged. This doubles the capacitance of the combination. |
|
|

What are dielectrics?
|
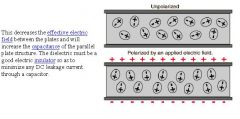
■Dielectric = nonconducting material. Inserting a dielectric between the plates of a capacitor increases the capacitance by decreasing V across the capacitor while maintaining the same Q. V = V0/κ and C = κC0. A dielectric is an electrical insulator that may be polarized by the action of an applied electric field. When a dielectric is placed in an electric field, electric charges do not flow through the material, as in a conductor, but cause dielectric polarization: positive charges are displaced along the field and negative charges shift in the opposite direction. This creates an internal electric field which partly compensates the external field inside the dielectric.If a material contains polar molecules, they will generally be in random orientations when no electric field is applied. An applied electric field will polarize the material by orienting the dipole moments of polar molecules. While the term "insulator" refers to a low degree of electrical conduction, the term "dielectric" is typically used to describe materials with a high polarizability. Dielectrics is described by the dielectric constant. A dielectric is the electrically insulating material between the metallic plates of a capacitor. The polarization of the dielectric by the applied electric field increases the capacitor's capacitance. For a given charge density, introducing a dielectric will weaken the electric field between the plates, because the negative charges of the dipoles of the dielectric shift in the opposite direction and oppose the electric field, making the electric field weaker. Since the field is weaker, it takes less work to move a charge, so now the voltage between the plates is less as well. In order to get the same voltage, you have to add a lot more charge. So the dielectric increased the capacitance of the plates, because more charges can be added to it. By putting the dielectric between the plates, the energy involved in the charge separation became less, because the field intensity became less. Dielectrics are like solvents - salt dissolves in water because water acts like a dielectric and enables the charges to separate because it makes the electric field between the positive Na and negative Cl weaker. A dipole moment = qd.
|
A dielectric acts to resist the creation of an electric field, and thus allow the capacitor to store more charge (to have greater capacitance).
|
|

What is the charging current that flows through a capacitor proportional too?
|
|
|
|

What is the capacitor voltage at any time t, for any values of R and C, and any battery voltage E?
|

|
|
|

What does the graph of a capacitor charging look like?
|
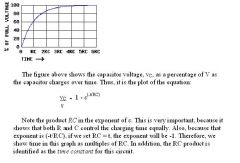
Thus, we see that the RC product is indeed a measure of time, and can properly be described as the time constant of this circuit. This in turn means that this curve can be used to determine the voltage to which any capacitor will charge through any resistance, over any period of time, towards any source voltage. It is the general curve describing the voltage across a charging capacitor, over time. Theoretically, C will never fully charge to the source voltage, V. In the first time constant, C charges to 63.2% of the source voltage. During the second time constant, C charges to 86.5% of the source voltage, which is also 63.2% of the remaining voltage difference between E and vC. This continues indefinitely, with vC continually approaching, but never quite reaching, the full value of V. However, at the end of 5 time constants (5RC), vC has reached 99.3% of V. This is considered close enough for practical purposes, and the capacitor is deemed fully charged at the end of this period of time. Mathematically, charging a capacitor takes an infinite amount of time.
|
|
|
|
How can the product of a resistance in ohms and a capacitance in farads possibly give us a time in seconds?
|

To understand how this is possible, we go back to the basic definitions and some dimensional analysis.
Resistance opposes the flow of current through a circuit. By Ohm's Law, R = V/I. Thus, 1 ohm may also be expressed as 1 volt/ampere. Current is a measure of the amount of charge flowing through a circuit in a given amount of time. By primary definition, 1 ampere is equal to 1 coulomb/second. Capacitance is the capacity to hold an electrical charge. A capacitance of 1 farad will exhibit a change of 1 volt if 1 coulomb of charge is moved from one plate to the other. Hence, 1 farad can be expressed as 1 coulomb/volt. |
|
|
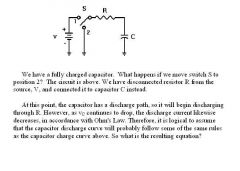
What is the graph of a discharging capacitor?
|
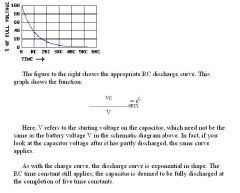
Mathematically, a capacitor will discharge in an infinite amount of time.
|
|
|
|
How is conductivity measured?
|
Conductivity is the ability of a solution to conduct electric current. The principle by which instruments measures conductivity is simple - two plates (cells) are placed in the sample, a potential is applied across the plates and the current is measured. Conductivity is determined from the voltage and current values according to Ohm's Law: Conductivity =1/R=I (amps)/V (volts) . The basic unit of measurement for conductivity is the Siemens (S).
|
|
|
|
How does Ohm's Law define the relationships between (P) power, (E) voltage, (I) current, and (R) resistance?
|
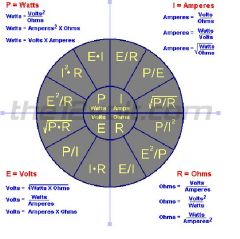
Ohm's Law defines the relationships between (P) power, (E) voltage, (I) current, and (R) resistance. One ohm is the resistance value through which one volt will maintain a current of one ampere. ( I ) Current is what flows on a wire or conductor like water flowing down a river. Current flows from negative to positive on the surface of a conductor. Current is measured in (A) amperes or amps. ( E ) Voltage is the difference in electrical potential between two points in a circuit. It's the push or pressure behind current flow through a circuit, and is measured in (V) volts. ( R ) Resistance determines how much current will flow through a component. Resistors are used to control voltage and current levels. A very high resistance allows a small amount of current to flow. A very low resistance allows a large amount of current to flow. Resistance is measured in ohms. ( P ) Power is the amount of current times the voltage level at a given point measured in wattage or watts.
|
Recall the change in pressure in a real fluid moving through a
horizontal pipe with constant diameter is given by the product of the volume flowrate and the resistance (ΔP = QR). Because we are probably more intuitive about fluids, it is often helpful to think of current as flow through a constant diameter pipe, and voltage as the difference in height between points in the pipe. (More precisely, voltage is analogous to gh, because V = Ed.) |
|
|
Does voltage or current themselves constitute power?
|
It must be understood that neither voltage nor current by themselves constitute power. Rather, power is the combination of both voltage and current in a circuit. Remember that voltage is the specific work (or potential energy) per unit charge, while current is the rate at which electric charges move through a conductor. Voltage (specific work) is analogous to the work done in lifting a weight against the pull of gravity. Current (rate) is analogous to the speed at which that weight is lifted. Together as a product (multiplication), voltage (work) and current (rate) constitute power. a circuit with high voltage and low current may be dissipating the same amount of power as a circuit with low voltage and high current. Neither the amount of voltage alone nor the amount of current alone indicates the amount of power in an electric circuit. A circuit with high voltage and low current may be dissipating the same amount of power as a circuit with low voltage and high current.
|
|
|
|
Can there be power if there is zero current or zero voltage?
|
In an open circuit, where voltage is present between the terminals of the source and there is zero current, there is zero power dissipated, no matter how great that voltage may be. Since P=IV and I=0 and anything multiplied by zero is zero, the power dissipated in any open circuit must be zero. Likewise, if we were to have a short circuit constructed of a loop of superconducting wire (absolutely zero resistance), we could have a condition of current in the loop with zero voltage, and likewise no power would be dissipated. Since P=IV and V=0 and anything multiplied by zero is zero, the power dissipated in a superconducting loop must be zero.
|
|
|
|
What is the root mean square?
|

In mathematics, the root mean square (abbreviated RMS or rms), also known as the quadratic mean, is a statistical measure of the magnitude of a varying quantity. It is especially useful when variates are positive and negative, e.g., sinusoids. It can be calculated for a series of discrete values or for a continuously varying function. The name comes from the fact that it is the square root of the mean of the squares of the values.
|
|
|
|
What are alternating currents?
|
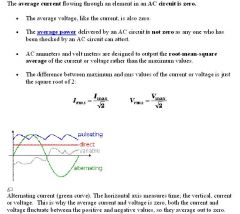
In alternating current (AC, also ac) the movement (or flow) of electric charge periodically reverses direction. An electric charge would for instance move forward, then backward, then forward, then backward, over and over again. In direct current (DC), the movement (or flow) of electric charge is only in one direction. The usual waveform of an AC power circuit is a sine wave. Alternating current is in simple harmonic motion. Maximum current occurs when electrons are at their maximum velocity. The maximum voltage is sqrt(2) * root-mean-square velocity and maximum current is sqrt(2) * root-mean-square current.
|
|
|
|
How would the results of Young's double slit experiment be different if light was a particle?
|
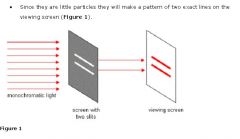
Thomas Young was able to offer some very strong evidence to support the wave model of light. •He placed a screen that had two slits cut into it in front of a monochromatic (single color) light. If light is a particle: We set up our screen and shine a bunch of monochromatic light onto it. •If light is a particle, then only the couple of rays of light that hit exactly where the slits are will be able to pass through. ◦Imagine it as being almost as though we are spraying paint from a spray can through the openings.
|
Light has a dual nature - it acts like both a wave and a particle. The propagation properties of light can be described with wave theory, while the energy transformation properties of light are usually best described by particle theory. Neither wave nor particle theory alone explains the phenomenon of light.
|
|
|
How does Young's Double slit experiment prove light is a wave?
|

We set up our screen and shine a bunch of monochromatic light onto it.
If light is a wave: There are still only two light rays that actually go through the slits, but as soon as they pass through they start to diffract. We must conclude that light is made up of waves, since particles can not diffract. Young's double slit experiment showed constructive and destructive interference by monochromatic light passing through two slits creating two coherent waves by diffraction with constant phase difference, due to they are coming from the same source. This interference can then be seen by projecting the light onto a piece of paper showing "Fringes" where a bright band is constructive interference and a dark band is destructive interference. |
|
|
|
What does coherence mean for light?
|
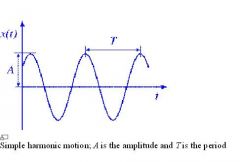
In physics, interference is the addition (superposition) of two or more waves that results in a new wave pattern. Interference usually refers to the interaction of waves that are correlated or coherent with each other, either because they come from the same source or because they have the same or nearly the same frequency. In physics, coherence is a property of waves that enables stationary (i.e. temporally and spatially constant) interference. More generally, coherence describes all properties of the correlation between physical quantities of a wave. When interfering, two waves can add together to create a larger wave (constructive interference) or subtract from each other to create a smaller wave (destructive interference), depending on their relative phase. Two waves are said to be coherent if they have a constant relative phase. The phase of an oscillation or wave can be readily understood in terms of simple harmonic motion. The same concept applies to wave motion, viewed either at a point in space over an interval of time or across an interval of space at a moment in time. Simple harmonic motion is a displacement that varies cyclically. The key to Young's Double slit experiment is the mutual coherence between the light waves diffracted from the two slits at the barrier. Although Young achieved this coherence through the diffraction of sunlight from the first slit, any source of coherent light (such as a laser) can be substituted for light passing through the single slit.
|
|
|
|
How can you calculate where the fringes are for diffracted light?
|

When you set up this sort of an apparatus, there is actually a way for you to calculate where the bright lines (called fringes) will appear. There is always a middle line, which is the brightest. We call it the central fringe. It is very easy to mix up the measurements of x, d, and L.
• Make sure to look at Figure 5 and see the different things each is measuring. • If you mix up x and d it's not so bad, since they are both on top in the formula. If you were to mix them up with L, you would get the wrong answer. |
|
|
|
What is the version of the formula where you measure the angle between the central fringe and whatever fringe you are measuring?
|
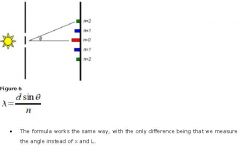
|
|
|
|
What is X-ray diffraction?
|
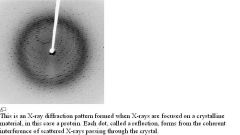
X-ray diffraction = X-rays diffracting on a crystal. Patterns of interference that results from this is used to deduce the structure of the molecules in the crystal. X-ray diffraction finds the geometry or shape of a molecule using X-rays. X-ray diffraction techniques are based on the elastic scattering of X-rays from structures. X-ray scattering techniques are a family of non-destructive analytical techniques which reveal information about the crystallographic structure, chemical composition, and physical properties of materials and thin films. These techniques are based on observing the scattered intensity of an X-ray beam hitting a sample as a function of incident and scattered angle, polarization, and wavelength or energy.
|
|
|
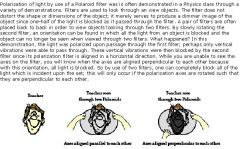
What are polaroid filters?
|

The most common method of polarization involves the use of a Polaroid filter. Polaroid filters are made of a special material which is capable of blocking one of the two planes of vibration of an electromagnetic wave. (Remember, the notion of two planes or directions of vibration is merely a simplification which helps us to visualize the wavelike nature of the electromagnetic wave.) In this sense, a Polaroid serves as a device which filters out one-half of the vibrations upon transmission of the light through the filter. When unpolarized light is transmitted through a Polaroid filter, it emerges with one-half the intensity and with vibrations in a single plane; it emerges as polarized light.
|
|
|
|
What is polarization by reflection?
|
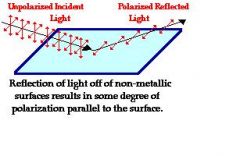
Unpolarized light can also undergo polarization by reflection off of nonmetallic surfaces. The extent to which polarization occurs is dependent upon the angle at which the light approaches the surface and upon the material which the surface is made of. Metallic surfaces reflect light with a variety of vibrational directions; such reflected light is unpolarized. However, nonmetallic surfaces such as asphalt roadways, snow fields and water reflect light such that there is a large concentration of vibrations in a plane parallel to the reflecting surface. A person viewing objects by means of light reflected off of nonmetallic surfaces will often perceive a glare if the extent of polarization is large. Fisherman are familiar with this glare since it prevents them from seeing fish which lie below the water. Light reflected off a lake is partially polarized in a direction parallel to the water's surface. Fisherman know that the use of glare-reducing sunglasses with the proper polarization axis allows for the blocking of this partially polarized light. By blocking the plane-polarized light, the glare is reduced and the fisherman can more easily see fish located under the water.
|
|
|
|
What is polarization by refraction?
|

|
|
|
|
What is polarization by scattering?
|
Polarization also occurs when light is scattered while traveling through a medium. When light strikes the atoms of a material, it will often set the electrons of those atoms into vibration. The vibrating electrons then produce their own electromagnetic wave which is radiated outward in all directions. This newly generated wave strikes neighboring atoms, forcing their electrons into vibrations at the same original frequency. These vibrating electrons produce another electromagnetic wave which is once more radiated outward in all directions. This absorption and reemission of light waves causes the light to be scattered about the medium. This process of scattering contributes to the blueness of our skies. This scattered light is partially polarized. Polarization by scattering is observed as light passes through our atmosphere. The scattered light often produces a glare in the skies. Photographers know that this partial polarization of scattered light leads to photographs characterized by a washed-out sky. The problem can easily be corrected by the use of a Polaroid filter. As the filter is rotated, the partially polarized light is blocked and the glare is reduced. The photographic secret of capturing a vivid blue sky as the backdrop of a beautiful foreground lies in the physics of polarization and Polaroid filters.
|
|
|
|
How can one obtain a laser?
|
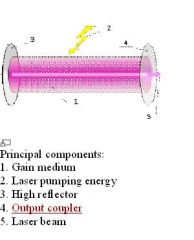
The gain medium of a laser is a material of controlled purity, size, concentration, and shape, which amplifies the beam by the process of stimulated emission. It can be of any state: gas, liquid, solid or plasma. The gain medium absorbs pump energy, which raises some electrons into higher-energy ("excited") quantum states. Particles can interact with light both by absorbing photons or by emitting photons. Emission can be spontaneous or stimulated. In the latter case, the photon is emitted in the same direction as the light that is passing by. When the number of particles in one excited state exceeds the number of particles in some lower-energy state, population inversion is achieved and the amount of stimulated emission due to light that passes through is larger than the amount of absorption. Hence, the light is amplified. By itself, this makes an optical amplifier. When an optical amplifier is placed inside a resonant optical cavity, one obtains a laser.
|
|
|
|
What is the difference between spontaneous and stimulated light emission?
|
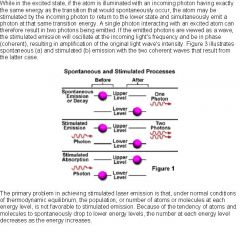
One of the most important concepts necessary in understanding laser operation is the fact that quantization of energy in the atom results in discrete energy levels. In addition, transitions from one energy level to another must be possible in order for light emission to occur, and these transitions include both spontaneous and stimulated emission. Electrons can undergo transitions from one level to the other by either absorbing or emitting light. Lower level electrons can only absorb light by stimulated absorption in order to be promoted into the upper level. Once an electron resides in the upper level, it can either spontaneously emit a light wave and drop to the lower level (spontaneous emission) or it can be stimulated by a light wave to emit a second wave and return to the lower level (stimulated emission).
If an atom or molecule lies in an energy state that is higher than the lowest, or ground level state, it can spontaneously drop to a lower level without any outside stimulation. One possible result of dropping to a reduced energy state is the release of the excess energy (equaling the difference in the two energy levels) as a photon of light. |
|
|
|
What is population inversion of light?
|
The reason that stimulated emission is difficult to achieve becomes apparent when considering the likely events surrounding the decay of an electron from an exited state with the subsequent and spontaneous emission of light. The emitted light could easily stimulate emission from another exited atom, but so few are available that the emission more likely will first encounter an atom in the ground state, and will be absorbed instead. Because the number of atoms in an exited state is so miniscule in relation to the number in the ground state, the emitted photon has a much greater probability of being absorbed, rendering stimulated emission insignificant when compared to spontaneous emission (at thermodynamic equilibrium). The mechanism by which stimulated emission can be made to dominate is to have more atoms in the excited state than in the lower energy state, so that emitted photons are more likely to stimulate emission than to be absorbed. Because this condition is the inverse of the normal equilibrium situation, it is termed a population inversion. As long as there are more atoms in the upper energy level than in the lower, stimulated emission can dominate, and a cascade of photons results. The first emitted photon will stimulate the emission of more photons, these subsequently stimulate the emission of still more, and so on. The resulting cascade of photons grows, resulting in the amplification of emitted light. If the population inversion terminates (the ground state population becomes dominant), spontaneous emission will again become the favored process.
|
|
|
|
What is refraction index and Snell's law?
|
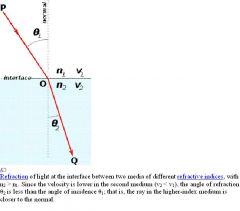
Snell’s law (n1sinθ1 =n2sinθ2)
The refractive index of a medium (such as water, air, glass, the vacuum of space, etc.) is a measure of how much the speed of a wave is reduced inside that medium compared to the speed of the wave in some reference medium. When a light ray travels from one medium (such as air) into another medium (such as glass), the difference in the refractive indices between these two media can change the direction (and intensity) of the light ray, a phenomenon that is characterized by Snell's Law. Snell's law is a formula used to describe the relationship between the angles of incidence and refraction, when referring to light or other waves passing through a boundary between two different media. The law says that the ratio of the sines of the angles of incidence and of refraction is a constant that depends on the media. The law is used to compute the angles of incidence or refraction or find the refraction index. |
Notice that in Snell's law, the angle of incidence and refraction are not specified; it makes no difference is light is moving from medium 1 to medium 2 or from medium 2 to medium 1. When light crosses into a new medium, the frequency remains the same and the wavelength changes. If the medium's index of refraction is higher, the wavelengths become shorter; if the index is lower, then the wavelengths become longer. The frequency remains the same because the energy remains the same (E = hf), but the velocity of the light through the medium is different (v = fλ because n = c/v, where n is the index of refraction). To have a higher n, you need a smaller velocity in the medium, to get that, you need a shorter wavelength. To have a lower n, you need a larger velocity, to get that, you need a longer wavelength.
|
|

Why does blue light refract more than red light in a prism?
|

Snell's law predicts that light incident at an angle θ to the normal will be refracted at an angle arcsin(sin(θ)/n). Thus, blue light, with a higher refractive index, will be bent more strongly than red light, resulting in the well-known rainbow pattern. The amount of overall refraction caused by the passage of a light ray through a prism is often expressed in terms of the angle of deviation. The angle of deviation is the angle made between the incident ray of light entering the first face of the prism and the refracted ray which emerges from the second face of the prism. Because of the different indices of refraction for the different wavelengths of visible light, the angle of deviation varies with wavelength. Colors of the visible light spectrum which have shorter wavelengths (BIV) will deviated more from their original path than the colors with longer wavelengths (ROY). The emergence of different colors of light from a triangular prism at different angles leads an observer to see the component colors of visible light separated from each other.
|
|
|
|
Why can light of certain frequencies be selectively absorbed, reflected or transmitted?
|

Atoms and molecules contain electrons. It is often useful to think of these electrons as being attached to the atoms by springs. The electrons and their attached springs have a tendency to vibrate at specific frequencies. The electrons of atoms have a natural frequency at which they tend to vibrate. When a light wave with that same natural frequency impinges upon an atom, then the electrons of that atom will be set into vibrational motion. Objects are set into vibration at their natural frequency when it is disturbed. If a light wave of a given frequency strikes a material with electrons having the same vibrational frequencies, then those electrons will absorb the energy of the light wave and transform it into vibrational motion. During its vibration, the electrons interacts with neighboring atoms in such a manner as to convert its vibrational energy into thermal energy. Subsequently, the light wave with that given frequency is absorbed by the material, never again to be released in the form of light. So the selective absorption of light by a particular material occurs because the selected frequency of the light wave matches the frequency at which electrons in the atoms of that material vibrate. Since different atoms and molecules have different natural frequencies of vibration, they will selectively absorb different frequencies of visible light. E = hf.
|
|
|
|
How do electromagnetic waves travel in materials when their frequencies do not match?
|
An electromagnetic wave (i.e., a light wave) is produced by a vibrating electric charge. As the wave moves through the vacuum of empty space, it travels at a speed of c (3 x 10^8 m/s). This value is the speed of light in a vacuum. When the wave impinges upon a particle of matter, the energy is absorbed and sets electrons within the atoms into vibrational motion. If the frequency of the electromagnetic wave does not match the resonant frequency of vibration of the electron, then the energy is reemitted in the form of an electromagnetic wave. This new electromagnetic wave has the same frequency as the original wave and it too will travel at a speed of c through the empty space between atoms. The newly emitted light wave continues to move through the interatomic space until it impinges upon a neighboring particle. The energy is absorbed by this new particle and sets the electrons of its atoms into vibration motion. And once more, if there is no match between the frequency of the electromagnetic wave and the resonant frequency of the electron, the energy is reemitted in the form of a new electromagnetic wave. The cycle of absorption and reemission continues as the energy is transported from particle to particle through the bulk of a medium. Every photon (bundle of electromagnetic energy) travels between the interatomic void at a speed of c; yet time delay involved in the process of being absorbed and reemitted by the atoms of the material lowers the net speed of transport from one end of the medium to the other. Subsequently, the net speed of an electromagnetic wave in any medium is somewhat less than its speed in a vacuum: c (3 x 10^8 m/s).
|
|
|
|
What is optical density?
|
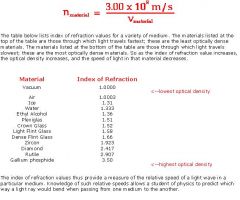
Like any wave, the speed of a light wave is dependent upon the properties of the medium. In the case of an electromagnetic wave, the speed of the wave depends upon the optical density of that material. The optical density of a medium is not the same as its physical density. The physical density of a material refers to the mass/volume ratio. The optical density of a material relates to the sluggish tendency of the atoms of a material to maintain the absorbed energy of an electromagnetic wave in the form of vibrating electrons before reemitting it as a new electromagnetic disturbance. The more optically dense which a material is, the slower that a wave will move through the material. One indicator of the optical density of a material is the index of refraction value of the material. Index of refraction values (represented by the symbol n) are numerical index values which are expressed relative to the speed of light in a vacuum. The index of refraction value of a material is a number which indicates the number of times slower that a light wave would be in that material than it is in a vacuum. A vacuum is given an n value of 1.0000.
|
|
|
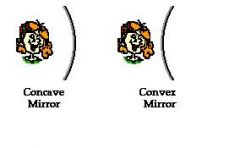
What is principal axis, center of curvature, vertex, focal point, radius of curvature, and focal length?
|
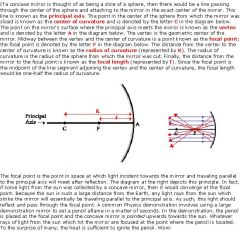
Curved mirrors which have a spherical shape are called spherical mirrors. Spherical mirrors can be thought of as a portion of a sphere which was sliced away and then silvered on one of the sides to form a reflecting surface. Concave mirrors were silvered on the inside of the sphere and convex mirrors were silvered on the outside of the sphere.
|
|
|
|
What is the image location?
|
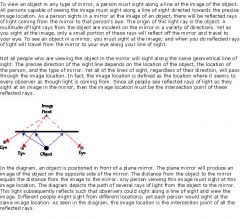
In order to view an object, you must sight along a line at that object; and when you do light will come from that object to your eye along the line of sight. This very principle can be extended to the task of viewing the image of an object in a plane (i.e., flat) mirror: In order to see the image of an object in a mirror, you must sight at the image; when you sight at the image, light will come to your eye along that line of sight.The image location is thus located at that position where observers are sighting when viewing the image of an object. It is the location behind the mirror where all the light appears to diverge from. We see an object by viewing the light either emitted or reflected (or both) by the object. Once the light has left the object, the light rays spread apart as they move further and further away. Such light rays are said to diverge. If we view an object, the light rays from the object diverge as they move through the pupil and into the eye, where they are made to converge by our eyes.
|
|
|
|
What are virtual images?
|

|
|
|
|
How can concave mirrors produce real images?
|

Concave mirrors are capable of producing real images (as well as virtual images). When a real image is formed, it still appears to an observer as though light is diverging from the real image location. Only in the case of a real image, the image is formed on the same side of the mirror as the object and light is passing through the actual image location.
|
|
|
|
What are convex mirrors?
|

To determine the image location of convex mirrors, only a pair of incident and reflected rays need to be drawn. The rules of reflection for convex mirrors are: 1) Any incident ray traveling parallel to the principal axis on the way to a convex mirror will reflect in such a manner that its extension will pass through the focal point. 2) Any incident ray traveling towards a convex mirror such that its extension passes through the focal point will reflect and travel parallel to the principal axis.
In 2nd and 3rd diagrams, the blue incident ray exemplify these two rules of reflection for convex mirrors. |
|
|
|
What are the image characteristics of an object in a concave mirror that is located beyond the center of curvature (C)?
|

|
|
|
|
What are the image characteristics of an object in a concave mirror that is located at C in a concave mirror?
|

|
|
|
|
What are the image characteristics of an object located in front of C in a concave mirror?
|

|
|
|
|
What are the image characteristics of an object located at F in a concave mirror?
|

|
|
|
|
What are the image characteristics of an object located in front of F in a concave mirror?
|

|
|
|
|
What is the relationship between the object distance and object size and the image distance and image size in concave mirrors?
|
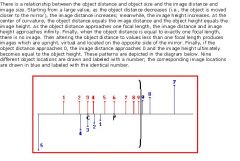
|
|
|
|
What are the image characteristics of convex mirrors?
|

|
|
|
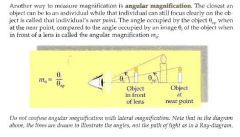
What is the mirror equation and magnification equation for concave and convex mirrors?
|

(1/p) + (1/q) = 1/f. p = the object distance and q is equal to the image distance. f is equal to the focal length. •f is + if the mirror is a concave mirror (or convex lens). •f is - if the mirror is a convex mirror (or concave lens). •q is + if the image is a real image and located on the object's side of the mirror (or on the other side of the lens). •q is - if the image is a virtual image and located behind the mirror (or in front of the lens). ■For the purpose of the MCAT, p is always positive unless the MCAT explicitly tells you otherwise. ■M = h'/h = |q|/p, where M is magnification, h' is height of image, h is height of object. The ratio of object (p) to image (q) distance equals the ratio of object height (h) to image height (h'). The magnification is the absolute value of q divided by p. For upright, virtual images, q is negative, for real and inverted images, q is positive. When using magnification, make sure to use the total magnification- so if you are given the magnification of an objective and an eyepiece, multiply both together to get the total magnification, then use that to solve for the object height or image height. Notice that for ALL mirrors and lenses, the magnification of the image is directly proportional to the image distance from the focal length. For any lens or mirror, if the image is 2 focal lengths from the focal point, the image is magnified by 2, if it is 3 focal lengths away, it is magnified by 3, etc. Notice that converging lenses and concave mirrors produce smaller images while the object is outside 2 focal lengths, but larger images when the object is within 2 focal lengths. Light from horizontal rays (parallel rays) is reflected by concave mirrors (or refracted by converging lenses) to focus on a single point called the focal point. For convex mirrors and diverging lenses, horizontal rays of light are reflected and refracted outward from a single point called the focal point. The focal point of convex mirrors and diverging lenses is found by tracing back along the reflected or refracted rays.The focal point for any mirror or lens is separated from the mirror or lens by the focal length. The focal length is f = 1/2r, where r is the radius of curvature.
|
1/f = (1/p) + (1/q) is called the thin lens equation, but it applies to mirrors as well. It is called the thin lens equation because it assumes that the lens is so thin that the light bends only once when passing through the lens (instead of at both interfaces). This equation relates the distance of the image to the focal length and the distance of the object. If you are given any set of these numbers, use it to find the focal length and the magnification. It helps to know what size an image will be and whether or not it's inverted. Also, if the magnification is the magnitude of 1, it means it is not magnified.
|
|
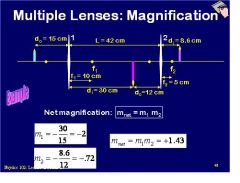
How are lenses combined?
|
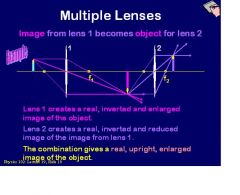
◦The real image formed by a lens can be used as the object for another lens. ◦Magnification by multiple lenses is the product of all the individual magnifications. An optical system may use a combination of mirrors, lenses, prisms, and other kinds of optical devices. An image formed by one component in an optical system can serve as an object for a different component. The combination of two lenses could serve to correct lens abberations together.
|
|
|
|
What is the difference in virtual images formed by convex and concave lenses?
|
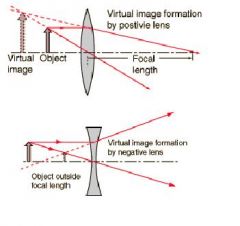
A virtual image is formed at the position where the paths of the principal rays cross when projected backward from their paths beyond the lens. Although a virtual image does not form a visible projection on a screen, it is no sense "imaginary", i.e., it has a definite position and size and can be "seen" or imaged by the eye, camera, or other optical instrument.
Diverging lenses form reduced, erect, virtual images. Converging lenses form virtual images if the object distance is shorter than the focal length. The virtual image is reduced for diverging lenses and enlarged for converging lenses. |
|
|
|
What is ray tracing for mirrors?
|

◦For mirrors: 1.First draw a parallel line from the object, as it bounces off the mirror, it intersects the focal point. Now, which focal point to intersect? The left or right? Use common sense: for concave mirrors, it's going to focus the ray to the left focal point. For convex mirrors, which can't focus, it's going to diverge the ray, which means you're going to have to extrapolate it to the right focal point. 2.Next draw a line that intersects the R point on the principle axis. Which R? Left or right? Should I extrapolate? Again, use common sense: The ray drawn should bounce right back its original path, and not be reflected else where. By eye-balling the mirror, you should be able to figure this out. 3.Now, you already have two rays drawn, and that is enough to make an intersection. Use this intersection as a guide to drawing the last ray. The last ray should first intersect the focal point, then bounce off the mirror parallel to the principle axis. Which focal point to intersect? Should I extrapolate? There's only one combination for the ray here to fit the intersection already made by the previous two rays. The trick to do this is to draw the parallel line first, and force it to intersect the intersection already made by the previous two rays.
|
|
|
|
What is ray tracing for lenses?
|

◦For lenses (similar to the way you draw rays for mirrors):
1.First draw the parallel → focal point ray. It should make sense which focal point the ray should hit/extrapolate given the converging/diverging nature of the lens. 2.Next draw a ray intersecting the center of the lens. 3.Lastly, using the intersection already made by the previous two rays as a guide, draw the focal point → parallel ray. Again, draw the parallel line first and force it to intersect the intersection already made by the previous two rays. |
|
|
|
What is ray tracing and how is it done with mirrors?
|
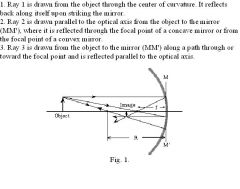
Ray tracing is the geometrical procedure for locating the image produced by a spherical mirror when you know the object's position.
A. Select an appropriate scale and mark the position of the object and the mirror on the optical axis, as shown. B. Draw a line MM' through the center of the mirror and perpendicular to the optical axis. C. Mark the focal point F of the mirror at f = R/2 on the optical axis and locate the object on the axis, all to the same scale. D. Draw the following rays to locate the image. As with lenses, any two of these reflected rays are sufficient to locate the image position at their intersection, but you should always draw the third ray as a check. E. If the reflected rays converge on the same side as the incident light, the image is real and is located at the intersection of these three rays. If the reflected rays diverge, the image is virtual and is located where these three rays appear to originate. You can measure the position and image height directly from the scale drawing. |
|
|
|
What is ray tracing for lenses?
|
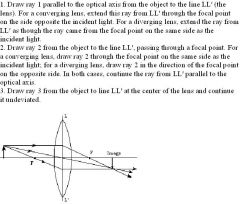
Ray tracing is the graphical procedure to follow for locating the image from a given lens when you know the object's position.
A. Select an appropriate scale (meters, centimeters, etc.) and mark the position of the lens on the optical axis. B. Draw a line LL' through the center of the lens and perpendicular to the optical axis, as shown. This line will replace the actual lens surfaces that refract the light. C. Mark the focal points F of the lens on the optical axis and locate the object on the axis, all to the same scale. (In problems of this sort, you will ordinarily be given the focal length f of the lens.) D. Draw the following rays. Any two of these rays are sufficient to locate the image, but you should always draw the third ray as a check. E. If the rays converge on the side opposite the incident light, the image is real and is located at the intersection of these three rays. If the rays diverge, the image is virtual and is located where these three rays appear to originate. You can measure the position and image height directly from the scale drawing. |
|
|
|
How does a mirror reflect light?
|
The mirrors that you use everyday, the ones you have in your homes, have flat surfaces. Because of this, they reflect almost all of the light. The image you see, the virtual image, the one in the mirror is the same size as the real object. The virtual image appears to be behind the mirror. The distance between the mirror and the object is the same as the distance between the virtual image and the mirror. The real object and the virtual image are basically identical except for one thing - the virtual image is reversed.
If you have ever noticed the mirrors that hang in stores, you would have realized that not all mirrors have flat surfaces. There are curved mirrors. These mirrors also refect light, but because they are curved the virtual image will look different. Curved mirrors produce the effect of enlarging or reducing. There are two types of curved mirrors: concave and convex. Concave increases the size of the object while convex decreases the size. |
|
|

How are conservation of mass and charge involved in radioactive decay?
|
•Conservation of mass dictates that total atomic weight before the decay equal the total atomic weight after. Conservation of charge dictates that the total atomic number before the decay equal the total atomic number after. Don't get thrown off by particles you do not recognize. As long as they have a weight and a charge, just incorporate these numbers in your calculations. MCAT problems on identifying decay products are just math work. Remember: the atomic number (the bottom number) determines what element it is. The mass numbers and charge numbers must add to the same total on each side of the equation. A nucleus will decay if there is a set of particles with lower total mass that can be reached by any of the decay processes. Nuclei with excess protons decay via position emission and convert to neutron(also called beta-plus) while nuclei with too many neutrons decay by beta decay and convert to proton (beta-minus or electron emission). Position emission lowers the atomic number by 1 and electron emission increases the atomic number by one. Gamma decay does not result in loss of mass and the atomic number does not change.
|
|
|

What is alpha decay?
|

Alpha decay is a type of radioactive decay in which an atomic nucleus emits an alpha particle, and thereby transforms (or 'decays') into an atom with a mass number 4 less and atomic number 2 less. An alpha particle is the same as a helium-4 nucleus, and both the mass number (4) and atomic number (2) are the same. The reason alpha decay occurs is because the nucleus has too many protons which cause excessive repulsion. In an attempt to reduce the repulsion, a Helium nucleus is emitted. An alpha particle has 2 protons and 2 neutrons, that's why it has an atomic mass of 4 and an atomic number of 2.
|
|
|

What is beta decay?
|

Beta decay (beta decay) can be either electron emission or positron emission. In electron emission, the neutron to proton ratio is too great and a neutron is turned into a proton and an electron. The electron is then emitted. There is also positron emission when the neutron to proton ratio is too small. A proton turns into a neutron and a positron and the positron is emitted. A positron is basically a positively charged electron. With electron emission, the proton number increases by 1 because a neutron is converted to a proton, while with position emission, the proton decreases by 1 because the proton is converted to a neutron. Electron capture is one process that unstable atoms can use to become more stable. During electron capture, an electron in an atom's inner shell is drawn into the nucleus where it combines with a proton, forming a neutron and a neutrino. The neutrino is ejected from the atom's nucleus. Since an atom loses a proton during electron capture, it changes from one element to another. For example, after undergoing electron capture, an atom of carbon (with 6 protons) becomes an atom of boron (with 5 protons). So the atomic number decreases by 1, like with positron emission, but with electron emission, the atomic number increases by one. Although the numbers of protons and neutrons in an atom's nucleus change during electron capture, the total number of particles (protons + neutrons) remains the same.
|
Beta decay is the emission of an electron OR a positron. If the atomic number increases, then an electron is released. If the atomic number decreases, then the positron is released (positron emission). Beta particles are electrons or positrons.
|
|
|
What is gamma decay?
|
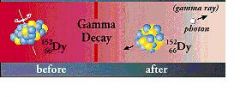
Gamma decay occurs because the nucleus is at too high an energy. The nucleus falls down to a lower energy state and, in the process, emits a high energy photon known as a gamma ray. Gamma rays are electromagnetic rays. They are the most dangerous because of its ability to penetrate large thicknesses of material.
|
|
|
|
What is the general nature of fission?
|
Nuclear fission is a nuclear reaction in which the nucleus of an atom splits into smaller parts (lighter nuclei), often producing free neutrons and photons (in the form of gamma rays), as well.
•Fission = one nuclei splitting apart. Uranium undergoes fission when struck by a free neutron. The fission of uranium generates more neutrons, which goes on to split other Uranium nuclei. This is called a chain reaction. |
|
|
|
What is mass deficit?
|
Classically a bound system is at a lower energy level than its unbound constituents, its mass must be less than the total mass of its unbound constituents. Since all forms of energy have mass, the question of where the missing mass of the binding energy goes, is of interest. The answer is that this mass is lost from a system which is not closed. It transforms to heat, light, higher energy states of the nucleus/atom or other forms of energy, but these types of energy also have mass, and it is necessary that they be removed from the system before its mass may decrease. The "mass deficit" from binding energy is therefore removed mass that corresponds with removed energy, according to Einstein's equation E = mc^2. The mass deficit is the difference between the mass of a system and the sum of the masses of its isolated parts, i.e. (sum of masses of protons and neutrons) - (measured mass of nucleus). Thus, if binding energy mass is transformed into heat, the system must be cooled (the heat removed) before the mass-deficit appears in the cooled system. In that case, the removed heat represents exactly the mass "deficit", and the heat itself retains the mass which was lost. Mnucleons = Mnucleus + binding energy. Mnucleons > Mnucleus because some of the Mnucleons is converted to binding energy that holds the nucleons together. Mnucleons = mass of all the nucleons that make up the atom in their free, unbound state. Mnucleus = mass of the nucleus. Mnucleons - Mnucleus = mass deficit (also called mass defect) = ΔM.
|
|
|
How is the frequency of lightand energy related?
|

E = hf, not E = hv. Sometimes v is referred to as frequency, but E is not equal to h* velocity. E = h* frequency. Period!
|
|
|
|
What is the difference between the electrostatic and electromagnetic force?
|
The attractive force between the electrons and the nucleus is called the electrostatic force (electric force). Experiments have shown that the electric force between two objects is proportional to the inverse square of the distance between the two objects. The electric force between two electrons is the same as the electric force between two protons when they are placed as the same distance. This implies that the electric force does not depend on the mass of the particle. Instead, it depends on a new quantity: the electric charge. The unit of electric charge q is the Coulomb (C). The electric charge can be negative, zero, or positive. The precise magnitude of the electric force that a charged particle exerts on another is given by Coulomb's law: kq1q1/r^2. Measurements of the velocity of the orbital electrons in an atom have shown that the attractive force between the electrons and the nucleus is significantly stronger than the gravitational force between these two objects. An important difference between the electric force and the gravitational force is that the gravitational force is always attractive, while the electric force can be repulsive (Fc > 0), zero, or attractive (Fc < 0), depending on the charges of the particles, where Fc is the electric force. The electric force exerted under circumstances in which the charges are at REST or are moving very slowly is the electrostatic force. On a microscopic scale, the electric force dominates the gravitational force, but on a macroscopic scale, the gravitational force dominates. Since most macroscopic objects are neutral, they have an equal number of protons and electrons. The attractive force between the electrons in one body and the protons in the other body is exactly canceled by the repulsive force between the electrons in the two bodies. If the charges are MOVING with a uniform velocity, they will experience both the electrostatic force and a magnetic force. The combined electrostatic and magnetic force is called the electromagnetic force. So the electromagnetic force comes into play when the charges are moving, while the electrostatic force comes into play when the charges are at rest. Electromagnetic forces can come into play with different molecules like the molecules of hand and of other objects, when the both come into contact with each other. With electrostatic forces, the forces can occur even when the charges are still "static", while with magnetic forces, the charges have to be in motion.
|
|
|
|
What is the significance of E = mc^2?
|
In physics, mass–energy equivalence is the concept that the mass of a body is a measure of its energy content. E is energy, m is mass, and c is the speed of light in a vacuum. The equation E = mc^2 indicates that energy always exhibits mass in whatever form the energy takes. Mass–energy equivalence also means that mass conservation becomes a requirement, of the law of energy conservation, which is the first law of thermodynamics. In physics, mass must be differentiated from matter, a more poorly-defined idea in the physical sciences. Matter, when seen as certain types of particles, can be created and destroyed, but the precursors and products of such reactions retain both the original mass and energy, both of which remain unchanged (conserved) throughout the process. The concept of mass–energy equivalence connects the concepts of conservation of mass and conservation of energy. The theory of relativity allows particles which have rest mass to be converted to other forms of mass which require motion, such as kinetic energy, heat, or light. However, the mass remains. Kinetic energy or light can also be converted to new kinds of particles which have rest mass, but again the energy remains. Both the total mass and the total energy inside a totally closed system remain constant over time. In other words, energy cannot be created or destroyed, and energy, in all of its forms, has mass. Mass also cannot be created or destroyed, and in all of its forms, has energy. According to the theory of relativity, mass and energy as commonly understood, are two names for the same thing, and neither one is changed or transformed into the other. Rather, neither one appears without the other. Rather than mass being changed into energy, the view of relativity is that rest mass has been changed to a more mobile form of mass, but remains mass. In this process, neither the amount of mass nor the amount of energy changes. Thus, if energy changes type and leaves a system, it simply takes its mass with it. If either mass or energy disappears from a system, it will always be found that both have simply moved off to another place.
|
|
|
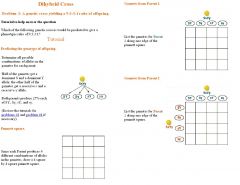
How do you create a dihybrid cross?
|

|
|
|

What is the difference of linked and unlinked genes in a dihybrid cross?
|

|
|
|
|
How is shear modulus related to Hooke's law?
|
Deformation produces oscillations in a solid body much like those produced in a spring. The material is deformed by a stress, and when the stress is removed, it springs back to its initial shape, but at that equilibrium point, the initial potential energy of deformation has been transformed into kinetic energy, and the jello overshoots equilibrium. We thus get oscillations. In this example, the student bumping into the table supplied an initial shearing stress that started the oscillations. In a spring, the frequency of oscillation increases with the magnitude of the spring constant, which by Hooke's law predicts the strength of the restoring force for a given displacement: F = -kx. An elastic modulus is similar in a fundamental way to Hooke's law. The larger the elastic modulus for a material, the more stress is necessary to produce a given strain, or thinking in one dimension, the greater the restoring force for a given displacement. So in our jello oscillators, the frequency of oscillation will increase with increasing shear modulus. The greater the force, the greater the acceleration - the more frequently the object vibrates.
|
|
|
|
How can you describe molecules of a fluid at rest?
|
Since the molecules of a fluid are not arranged with any order or structure, but move about in random directions relative to each other, a fluid has only temporal (impermanent) resistance to forces that are not perpendicular to its surface. However, since fluid molecules require room to move, collectively, they can create a permanent force outward from within the fluid. This outward force allows a fluid to permanently withstand forces perpendicular to its surface. In other words, the only permanent force that a resting fluid can exert is one normal to its surface. Thus a fluid is pushed and molded until is surface matches the shape of its container exactly. When the fluid comes to rest, it experiences only the normal force from the surface of its container and the force of gravity. A liquid takes on a flat upper surface so that the gravitational force is also perpendicular. In a gas, gravity has an insignificant effect on the path of an individual molecule due to the high average velocity of the molecules, and a gas will fill an enclosed container.
|
|
|
|
How does Bernoulli's equation relate to uniform translational motion of fluids?
|
From Bernoulli's equation we can derive an important notion about the relationship between pressure and velocity in ideal fluid flow. As velocity increases, pressure decreases. Uniform translational kinetic energy is achieved by borrowing energy from the random translational kinetic energy, thus pressure goes down. By having a high velocity (kinetic energy), some of the energy is borrowed from the pressure (potential energy).
|
|
|
|
Do non-ideal fluids behave in an opposite manner to ideal fluids?
|
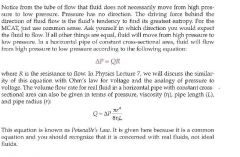
NO! Non-ideal fluids do not behave in an opposite manner from ideal fluids. Narrowing a pipe increases the velocity of a non-ideal fluid as well. However, with a non-ideal fluid, you must also consider drag, which impedes flow. Thus, if you narrow the pipe in a non-ideal fluid, velocity will probably increase, but not as much as if there were no drag.
|
The volume of a pipe is π*r^2*h, where r is the radius and h is the height of the cylinder. The surface area of the sides of the cylinder is 2π*r*h, where h is the height of the cylinder and r is the radius.
|
|

What happens when a wave transfers from one medium to the next?
|

IMPORTANT: When a wave transfers from one medium to the next, the WAVELENGTH changes and the FREQUENCY remains the same. The energy is conserved via frequency, just the wavelength changes. The behavior of a wave (or pulse) upon reaching the end of a medium is referred to as boundary behavior. When one medium ends, another medium begins; the interface of the two media is referred to as the boundary and the behavior of a wave at that boundary is described as its boundary behavior. Frequency is inversely proportional to wavelength, but frequency is not 1/wavelength, frequency is 1/period. The speed changes because wavelength changes.
|
|