Reading...
![]()
Play button
![]()
Play button
![]()
Use LEFT and RIGHT arrow keys to navigate between flashcards;
Use UP and DOWN arrow keys to flip the card;
H to show hint;
A reads text to speech;
29 Cards in this Set
- Front
- Back
|
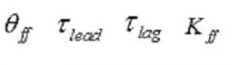
Feedforward block diagram
|
.
|
|
|
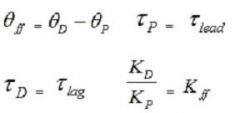
Characteristic Equation
Feedforward Control |

'
|
|
'
|
.
|
|
.
|
.
|
|
.
|
.
|
|
|
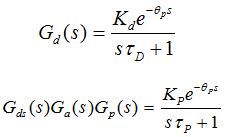
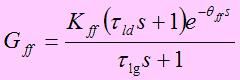
Transfer Function
Feedforward Control |

.
|
|
|
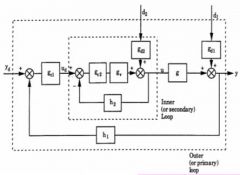
Cascade
Requirement for Secondary Loop |
3 times as fast as Primary
ts < (1/3)tp (ISE, ITSE) Tightly Tuned |
|
|
Cascade
Tune ___ Loop First, Controls _____ Output |
Primary
|
|
|
Suppress D
|
Feedforward
|
|
|
Goal of Feedforward
|
Compensate for the effect of disturbance before it causes an effect
|
|
|
Tuning Feedforward Controller
|
Field Tuning
Turn off feedback - open loop Analysis for Kff, tld, tlg, thetaff Adjust Kff to eliminate offset Adjust thetaff to minimize overshoot |
|
|
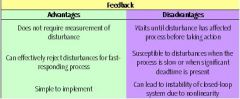
Advantages/Disadvantages of Feedback Control
|
.
|
|
|
Advantages/Disadvantages of Feedforward Control
|
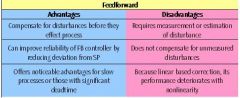
.
|
|
|
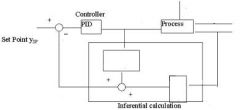
Inferential Control uses _____ to ______
E.g. Use ___, ___, ____ to infer _____ and ____ ____ |
Uses easily measured process variables to infer more difficult to measure quantities
Temp, Pressure, Flow to infer compositions and molecular weight |
|
|
Inferential Control reduces
|
Inferential Control reduces deadtime at a very effective price
|
|
|
Inferential Control can reduce
|
Can substantially reduce analyzer delay
|
|
|
Inferential Control can provide
|
Can provide measurements that are not available any other way
|
|
|
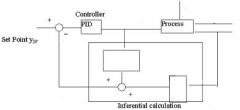
Goal of Inferential Control is to
|
Calculate y to plug in to controller, replaces measurement of y
|
|
|
Conditions where inferential control needed
|
An on-stream sensor is not possible
An on-stream sensor is too costly Unfavorable sensor dynamics (long dead time) or is located far downstream A inferential variable is available |
|
|
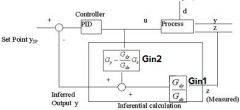
Inputs to inferential part of controller (Logic of inferential control scheme)
|
u or M(s)
d or D(s) |
|
|
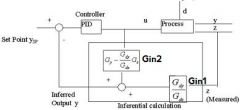
Outputs from inferential part of controller (Logic of inferential control scheme)
|
y: measured output to be controlled
x: measured output that is used to estimate/infer other outputs |
|
|
Inferential controller is physically realizable when
|
Measureable in real time
Inferential measurement must correlate strongly with the CV of interest Correlation should be relatively insensitive to unmeasured disturbances Plot of y vs. x should be linear |
|
.
|
.
|
|
|
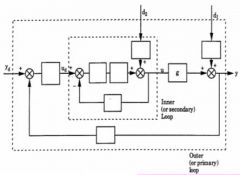
Cascade
|
Upstream controller to regulate deviations further down series of processes
Downstream sensitive to upstream disturbances |
|
|
Inner loop
|
High proportional gain for fast inner-loop response
Eliminate input disturbance, P or PI is sufficient |
|
|
Outer loop
|
Tuned with the inner loop in operation for overall performance
PID controller |
|
.
|
.
|
|

.
|

.
|
|
.
|
.
|