![]()
![]()
![]()
Use LEFT and RIGHT arrow keys to navigate between flashcards;
Use UP and DOWN arrow keys to flip the card;
H to show hint;
A reads text to speech;
114 Cards in this Set
- Front
- Back
|
Important Aspects of Forces |
Magnitude Duration Distribution (over the surface) Duration Point of application (Line of action of force) Time history of force (force as a fn of time) |
|
|
Model- What is it |
Simple representation of the system Diagram of the system under specific conditions (forces) Equations that permit calculation of some unknown parameters |
|
|
Mechanics |
The study of forces and their effects |
|
|
Statics |
The study of objects in equilibrium |
|
|
Dynamics |
The study of objects in motion |
|
|
Space |
The 3D universe in which we live Unit: meters (m) |
|
|
Time |
measured between the intervals of repeatable events Unit: seconds (s) |
|
|
Velocity |
The rate of change of a points location in space Unit: meters per second (m/s) |
|
|
Acceleration |
The rate of change of a velocity Unit: meters per second squared (m/s² ) |
|
|
Newton's Laws of Motion |
1. If the net force on an object is zero, its velocity is unchanged 2. Fnet = ma (net force = mass times acceleration) 3. the forces exerted by 2 objects on each other are equal but in opposite directions (every action has an equal and opposite reaction) |
|
|
Biomechanics |
The study of the effects and control of forces that act on or are produced on living tissue Understanding the generation of internal forces in the human body |
|
|
Model - how does it help? |
Used to predict the behaviour of the system under the influence fo forces (using the eqns) without having to build the real system and test it repeated calculations of unknown parameters = simulation |
|
|
Steps to Problem Solving |
Identify - given information, given parameters (input) -unknown parameters to determine (output) Strategy -draw diagram -identify principles that apply -write eqns that apply Predict the answer Solve Eqn for unknown parameters Interpret results: -does the answer make sense -is the answer reasonable |
|
|
Significant Digits and Rounding |
Count left to right, starting with the first non-zero digit. Zeros after a decimal point count Do not round intermediate calculations Answer should have same sigfigs as given data |
|
|
Newtonian Gravitation |
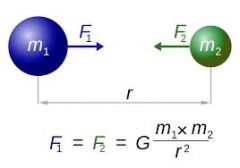
A particle attracts every other particle in the universe according to Newton F = gravitational force m = mass r = distance between radius of 2 objects G = gravitational constant (6.67x10^-11) |
|
|
Weight due to attraction to Earth (NOT sea-level) |
Weight of an object of mass m due to gravitational attraction to the earth W = (G*m*mE)/ r² mE = mass of earth r = distance from center of earth |
|
|
Acceleration due to attraction to Earth (NOT sea-level) |
Acceleration due to gravity at a distance r from center of earth a = (G*mE)/ r² mE = mass of earth r = distance from center of earth |
|
|
Gravitational Constant G |
6.67 x 10^-11 |
|
|
Weight at sea-level |
g = gravitational constant at sea-level = 9.81 m/s² m = mass of object W = mg |
|
|
Vectors |
A quantity that has both a magnitude and direction |
|
|
Position Vector |
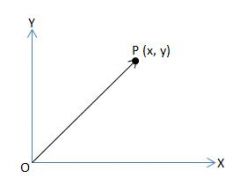
The location of a particle relative to the origin rA describes the position of point A magnitude of rA is | rA| = rA rA has a direction θ from the x-axis |
|
|
Relative Position Vector |
Relative position of point B from point A rA + rAB = rB rAB = rB - rA The distance between the two points is the magnitude of the vector |rAB| |
|
|
Vector rules |
u + v = v + u ( u + v ) + w = u + ( v + w ) if the sum of 2 or more vectors is 0, they form a closed polygon au has a magnitude of |a||u| so -3u has a magnitude of 3|u| a (bu) = (ab) u (a+b) u = au + bu a (u + v) = au + av |
|
|
Unit vectors |
vector with a magnitude of 1 i is x direction, j is y direction, k is z direction u = |u| eU eU = u / |u| eU has a magnitude 1 and direction of u Unit vectors are helpful in specifying direction Unit vectors wear a hat ^ |
|
|
Two-Dimensional (2D) Components |
A vector can be broken into perpendicular components: ux and uy u = ux + uy and using unit vectors u = ux i + uy j |
|
|
Magnitude of a Vector |
Use the Pythagorean theorem |u| = Sqrt(ux² + uy² ) |
|
|
Determining Vector Components |
F = Fx + Fy Fx = |F|cosθ i Fy = |F|sinθ j therefore F = Fcosθ i + Fsinθ j |
|
|
Vector Components in 3D |
u = ux i + uy j + uz k |u| = Sqrt(ux² + uy² + uz²) the direction cosines are the components of a unit vector in the direction of u Direction of vector described by θx, θy, θz ux = |u|cosθx or ux = |u|ex uy = |u|cosθy or ux = |u|ex ux = |u|cosθz or ux = |u|ex cos²θx + cos²θy + cos²θz = 1 |
|
|
Right Hand Rule for Cartesian Planes |
hand points in line with X-axis bend fingers towards Y-axis thumb points in direction of Z-axis |
|
|
Vector Dot Products by Angle |
Useful in determining component of a vector parallel or perpendicular to a given line u·v = |u||v|cos θ Result of dot product is a scalar if u and v are NOT 0: u·v = 0 IF AND ONLY IF u and v are perpendicular (cos θ = 0) |
|
|
Dot Product Rules |
u·v = v·u a(u·v) = (au) · v = u · (av) u · (v + w) = u · v + u · w i · i = 1 (by itself is 1) i · j = 0 (by perp. vector is 0) |
|
|
Vector Dot Product by Components |
u · v = uxvx + uyvy + uzvz |
|
|
Find angle between 2 vectors |
cosθ = (u · v) / (|u||v|) |
|
|
Determining the components of parallel vector (u//) |
|u//|= |u|cos θ u// = (e · u) e where e is a unit vector on the line you want to be parallel to |
|
|
Determining the components of a perpendicular vector (uperp) |
uperp = u - u// |
|
|
Law of Sines |
sina/A = sinb/B = sinc/C and A/sina = B/sinb = C/sinc |
|
|
Law of Cosines |
C² = A² + B² - 2ABcosc |
|
|
Vector Cross Products |
Input 2 vectors, output is 3rd vector, perpendicular to other 2 vectors Often related to rotation |
|
|
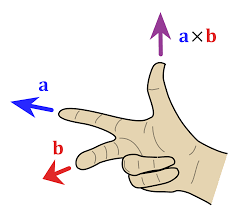
Cross Product Right Hand rule |
|
|
|
Calculating cross product with components |

|
|
|
Calculating Cross Product with Angle |
u x v = |u| |v| sin θ e in which e is a unit vector perpendicular to u and v u x v = 0 IF AND ONLY IF u is parallel to v |
|
|
Cross Product Rules |
u x v = -(v x u) a(u x v) = (au) x v = u x (av) u x ( v + w ) = ( u x v ) + ( u x w ) |
|
|
Cross products of Unit Vectors |
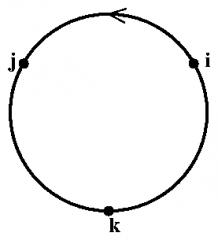
In direction of arrows = positive Against arrows = negative Crossed with itself = 0 |
|
|
Mixed Triple Product |
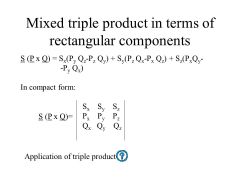
components from cross product dotted by other vector |
|
|
Mechanics Problems: Main Steps |
Free Body diagram to identify forces on objects Force equilibrium eqns to identify unknown forces Moment Equilibrium Eqns to identify unknown moments Need same number of equations as unknowns or more (3 eqns, 3 or less unknowns) |
|
|
Surface Force |
Force acting on a body's surface. |
|
|
Line of action |
Imaginary line in the direction of the force and passing through the point where the force is applied Useful in determining if a force will cause a moment If passes through the point around which you are calculating moment at, no moment is produced |
|
|
External Force |
Force applied to a system from outside the system (weight, normal force, friction, etc.) |
|
|
Internal Force |
Force that one part of a structure exerts on other parts within the same structure Exposed when making a cut in a system Ex. When analyzing a shank foot, the force of the knee is an external force, but in the entire leg, it is an internal force |
|
|
Body Force |
Force that acts on the volume of the body (gravity, magnetism, etc) |
|
|
System of Forces |
A particular set of forces. Can be 2 dimensional (coplanar) or 3 dimensional. |
|
|
Concurrent Forces |
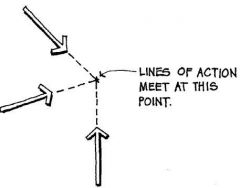
Forces whose lines of action all intersect at a common point |
|
|
Parallel Forces |
forces exerted on the same body and along parallel lines of action |
|
|
Contact Force |
Forces which result from contact between objects Contacting objects exert equal and opposite forces on each other Note: Normal force is perpendicular top tangent plane of surface Friction Force is parallel to tangent plane |
|
|
Smooth vs Rough Surfaces |
Smooth = friction is negligible Rough = friction must be considered |
|
|
Guidelines for Rope/pulley problems |
Assume the weight of the rope is negligible and cable is completely straight Force in rope/cable is the Tension in the cable Line of action of T is collinear with cable Assume that the tension throughout the rope is uniform |
|
|
Equilibrium |
A state of balance or equality between opposing forces so there is no acceleration. Sum of forces = 0 Sum of moments = 0 |
|
|
Static Equilibrium |
A condition where there are no net external forces acting upon a particle or rigid body and the body remains at rest
Sum of forces = 0 Sum of moments = 0 |
|
|
Free Body Diagram (FBD) |
Focus attention on the object of interest and identify external forces acting on it. Drawing shows the object isolated from its surroundings Can tilt axis to simplify calculations |
|
|
Steps to draw a FBD |
0. Identify the x and y directions 1. Identify the object to isolate 2. Sketch the object isolated from its surroundings with dimensions and angles 3. Draw vectors representing all of the external forces acting on the isolated object and label them NOTE: External force could result from a cut made where object was connected to a larger body |
|
|
Gravitational Forces (Weight) |
Weight of an object can be represented as a vector. At sea level, where m = mass in g and g= accel. due to gravity= 9.81|W| = mg |
|
|
Sum of forces in System |
ΣF = ΣFx + ΣFy (+ ΣFz)= 0 therefore ΣFx = 0 ΣFy = 0 (and ΣFz = 0) |
|
|
Moment (Definition) |
The turning effect of a force around a fixed point called a pivot |
|
|
Calculating a moment |
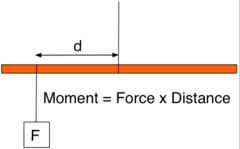
Mp = DF The moment about point P (Mp) is equal to the perpendicular distance from P to the line of action of F (D) times the magnitude of Force F A counterclockwise moment is positive A clockwise moment is negative If the line of action crosses P, D=0 so MP = 0 |
|
|
A moment in components |
Even if you break an force F into components, the moment of F about P is equal to the sum of the moments of the components of F about P |
|
|
Moment Vector |
Given a point P and a force F, Mp = r x F (NOT F x r) where r is a vector from P to any point on the line of action of F |Mp| = |r| |F| sin θ where theta is the angle between r and F tail to tail |Mp|= DF when r is perpendicular to F |
|
|
Finding Direction of a moment |
Mp is always perpendicular to r and F Right Hand Rule: hand along r, curl fingers towards F. Thumb points in direction of moment |
|
|
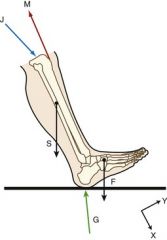
Ground Reaction Force (GRF) |
Force exerted by the ground on a body in contact with it A combination of Normal and Friction forces of the ground on the body Ground exerts a reaction force equal in magnitude opposite in direction to the foot force |
|
|
Point of Application of Force |
Point where the force is applied to the body Important to determine if the body will tend to rotate (like line of action) |
|
|
Analysis of Equilibrium Steps |
Use FBD to analyze if object is in equilibrium ΣF = 0, but this is not enough If forces are along different lines of action, they could cause a moment |
|
|
Couple |
2 forces with equal magnitude, opposite direction and a different line of action tend to rotate (cause a moment) |
|
|
A rigid body acted on by 2 forces is in static equilibrium only if... |
the 2 forces are collinear, equal in magnitude and opposite in direction |
|
|
A rigid body acted on by a couple is in static equilibrium only if... |
It is acted on by another couple equal in magnitude and opposite in sense (perpendicular) F1d1 = F2D2 where F1 and F2 are the magnitudes of the forces of each couple and d1 and d2 are the distance between the two forces in each couple |
|
|
Moments about any point |
A moment applied to a body from a cut on the body and a couple exerts the same moment about any point |
|
|
Making a cut to simplify a FBD |
When making a cut in a body, a moment is (often?) added |
|
|
Tip for Taking Moment about a point |
Take moments about a point on the line of action of many forces this eliminates these forces from the moment equation and reduces unknowns |
|
|
Tibialis Anterior (location and function) |
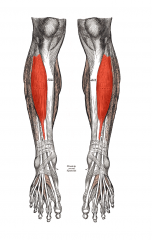
Muscle on front of shank Lifts the foot using flexion of the ankle (dorsiflexion) When walking, generates a moment (MA) to slowly lower the foot to the ground by resisting the GRF |
|
|
Gastrocnemius (location and function) |
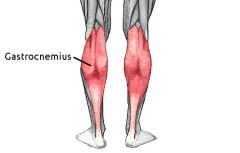
Largest calf muscle Responsible for plantar flexion of the foot at the ankle joint and flexing the leg at the knee joint |
|
|
Soleus (location and function) |
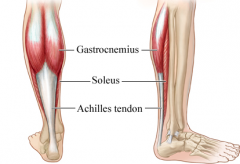
Under the gastrocnemius on the calf Main function is flexing the foot (plantar flexion) while standing on toes, walking, etc. |
|
|
Muscles while walking |
When the heel strikes the ground: GRF tends to cause a moment to quickly rotate the foot into the ground Tibialis Anterior muscle generates a moment MA to slowly lower foot to the ground |
|
|
Difficulty when walking (Tibialis Anterior) |
In some people, the Tibialis Anterior is not functional and the foot slaps down to the ground ("Foot Slap") In some people, the Tibialis Anterior is unable to lift the foot when the leg lifts off the ground to swing forward, so the toe drags and cannot clear the ground ("Drop Foot") Functional Electric Stimulation (FES) is used to provide peripheral nerve stimulation to activate the T.A. |
|
|
Component Equilibrium Equations |
2D: 3 independent eqns (ΣFx, ΣFy, ΣMp) can solve for 3 unknowns 3D: 6 independent eqns (ΣFx, ΣFy, ΣFz, ΣMx, ΣMy, ΣMz) can solve for 6 unknowns |
|
|
Moment about a line |
Mp is a moment of F about an arbitrary point P on line L ML: is a moment of F about line L is the component of Mp parallel to L ML = ê · (r x F) |
|
|
Plantar/dorsi flexion rotation and moments |
Rotation is the actual movement of the foor Moment is the result of forces on the foot Note: Dorsi flexion moment can occur with plantar flexion rotation and vice versa Rotation and moment are not necessarily the same! |
|
|
Tips for Pulley Problems |
Same as cord/rope guidelines, with a few extra: Assume pulley is frictionless Pulley is stationary or rotating at a constant rate Tension on both sides of the pulley are the same |
|
|
Spring Problems |
|F|= k * |L-Lo| OR |F|= k * Δ x Magnitude of Force is spring constant (k) times the distance the spring has been stretched or compressed (Δx), which is new length (L) minus unstretched length (Lo) |
|
|
Rigid Body |
Body in which deformation is neglected |
|
|
When working in a system with multiple parts... |
Draw FBD of isolated parts Don't forget some internal forces become external when you make a cut Determine unknown forces using equilibrium eqns |
|
|
Pin Joint support (2D) |
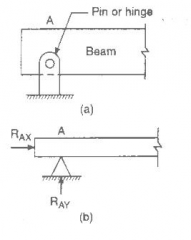
Smooth Pin- Frictionless Resisting forces in x and y directions No resisting moment (rotation around pin is possible) Applies to hinge joints |
|
|
Roller Support (2D) |

Body lies on rollers or a ball Resisting force only perpendicular to surface on which it lies (usually in y direction) no resisting moment also includes pin in a slot |
|
|
Supports (function and types) |
Create resisting forces and moments Pin joint support, roller support, Simple/plane support, fixed support. |
|
|
Simple/planar support (2D) |

Body lies on a planar surface resisting force only perpendicular to surface no resisting moment |
|
|
Fixed support (2D) |

Resists in x direction and y direction can also resist a moment (unlike pin) |
|
|
Contact with curved surfaces |
Smooth: Normal force normal to tangent plane Rough: Normal normal to tangent and friction parallel to tangent |
|
|
A rigid body acted on by 3 forces can be in static equilibrium only if... |
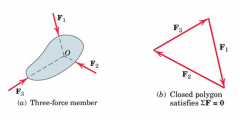
the lines of action of the 3 forces are concurrent at the same point and if the vectors form a closed triangle (therefore sum of forces is 0) F3 must = -(F1+F2) |
|
|
If F1, F2, F3,... FN are concurrent forces (concurrent at point Q), the moment of the system of all forces about a point P is... |
rPQ x (F1 + F2, + F3+ ... + FN) where rPQ is the position vector from the point of concurrence to the point P and it is crossed with the sum of all concurrent forces |
|
|
A body with a single force passing through point p is also equivalent to... |
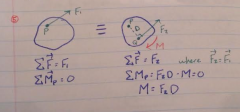
Another body with a force of the same magnitude a certain distance from P (causing a moment) with an additional resisting moment to negate it |
|
|
Statically Indeterminate object |
more unknown forces or moments than independent eqns caused by: 1) Redundant supports 2) Improper supports |
|
|
Redundant supports |
can cause a statically indeterminate system more supports than needed for equilibrium causes too many reaction forces 1 more unknown than eqn = 1 degree of reduncancy, etc |
|
|
Improper supports |
can cause a statically indeterminate system supports that do not maintain equilibrium some equilib eqns cannot be satisfied ex. parallel reaction forces, non-parallel force or concurrent rxn forces, non-concurrent force |
|
|
Statically Indeterminate Systems in Biomechanics |
Multiple muscles at a single joint lead to more unknowns than can be solved for easily One way to help solve is using assumptions about muscle stress Ex. Biceps brachii and brachialis both act on elbow joint |
|
|
Muscle Stress |
assume proportion of load in muscles is proportional to cross-sectional area of the muscles Muscles have same stress per square cm therefore FB/AB = FBB/ABB (using brachialis and Biceps Brachii) Ex. if ABB/AB = 1.5 then ABB = 1.5AB then FBB = (ABB/AB) FB |
|
|
Biceps Brachii (location and function) |

Upper arm, between shoulder and elbow Helps control the motion of shoulder and elbow |
|
|
Brachialis (location and function) |

Lies under the lower section of the Biceps Brachii Aids in flexion of the elbow joint |
|
|
Ball Joint/Ball and socket (3D support) |
resists 3 orthogonal forces (Ax, Ay, Az) Resists translation (movement) in any direction Permits rotation in any direction (allows all moments) Ex. Hip joint |
|
|
Roller Support (3D) |

Somewhat like ball joint in structure Resisting force in 1 direction (Ay) only Can roll in any direction, allows moments 1 reaction (translation in y) |
|
|
Hinge (3D support) |
3 forces resisted (Ax, Ay, Az) 2 moments resisted (about x and y axis) allows moment about 1 axis (z) 5 total reactions : 3 translations & 2 rotations resisted |
|
|
Fixed Support (3D support) |
6 reactions total 3 force reactions (Ax, Ay, Az) 3 moment reactions (x, y, z axes) |
|
|
Erector spinae (location and function) |
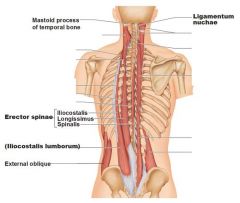
bundle of muscles and tendons in back Functions to straighten the back and provides for side-to-side rotation |
|
|
Analysis of system with multiple members Link-Segmented Model |
bottom-up approach use body segments as links 1 moment applied by muscles between each segment GRF measured by force plate/sensors separate analyses performed in order (foot, shank, thigh... move up) 3 eqns and 3 unknowns for each as you move up (planar analysis) Special case: pin joint and moment from muscles |
|
|
quadriceps (location and function) |
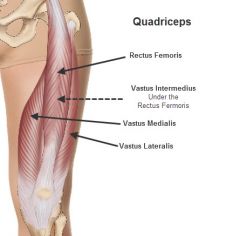
Group of muscles on front of thigh Main function: extension of the knee Also: move the hip, prevent the knee from buckling |
|
|
2 force member |
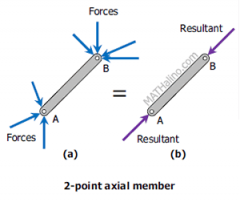
System of forces and moments acting on object is equivalent to 2 forces acting at different points the line of action of the 2 forces must be coincident or they form a couple |
|
|
3 force member |
If the system is equivalent to three forces acting on different points, it is a 3 force member. For the system to be in equilibrium, the forces must either be parallel or concurrent. |
|
|
3 force member calculations |
1. prove the forces are coplanar let L be a line between F1 and F2. since moment about L due to F1 and F2 are 0, moment about L due to F3 is also 0. This means F3 is perpendicular to L x rF3 therefore F3 is in plane, therefore forces are coplanar 2. if forces are not parallel, their lines of action will intersect at one point (if system is in equilib) |