![]()
![]()
![]()
Use LEFT and RIGHT arrow keys to navigate between flashcards;
Use UP and DOWN arrow keys to flip the card;
H to show hint;
A reads text to speech;
17 Cards in this Set
- Front
- Back
|
Drag Force |

f(v) = f_lin + f_quad f_line = bv = beta*D*v f_quad = cv^2 = gamma*D^2*v^2 |
|
|
Center of Mass of Several Particles |

|
|
|
Angular momentum |
l = r x p |
|
|
Total angular momentum for several particles |
|
|
|
Change in total angular momentum (L dot) |

L_dot = net external torque |
|
|
Change in total linear momentum |
P_dot = external force |
|
|
External Force (momentum form) |
F_ext = MR_ddot |
|
|
Change in angular momentum for single particle !relative to origin! |

l_dot = r x F == T (net torque) |
|
|
When is l_dot == 0 |
l_dot = r x F ==0 for single particle when torque=0 at origin And F is parallel to position vector r |
|
|
Angular momentum (in terms of mass and angular velocity) |
l = m*r^2*w Because l = r x p p = mv w = v/r |
|
|
Change in KE |

|
|
|
Conservative potential energy |

|
|
|
Potential energy for hookes law |
U = 0.5 * kx^2 |
|
|
SHM |
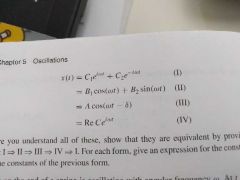
For x_ddot = -w^2 * x Where w^2 = k/m |
|
|
Damped osc |
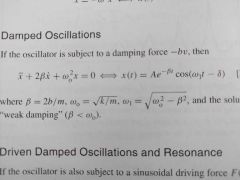
Damping force -bv
|
|
|
Driven damped osc |
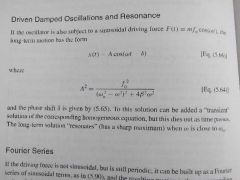
x_ddot + 2beta*x_dot + omega_0^2*x = f(t) Where f(t) is F(t)/m General solution for sinusoidal driving force: X(t) = A*cos(wt - d) + C*e^(r_1*t) + D*e^(r_2*t) |
|
|
Weakly damped driving osc: general sol w/ transient specifications |

|