![]()
![]()
![]()
Use LEFT and RIGHT arrow keys to navigate between flashcards;
Use UP and DOWN arrow keys to flip the card;
H to show hint;
A reads text to speech;
81 Cards in this Set
- Front
- Back
|
Gaussian Elimination |
When you solve a system like a normal person. The resulting matrix is in echelon form. |
|
|
echelon form |
A matrix has this form if... 1. Every leading term is in a column to the left of the leading term of the row below it. 2. Any zero rows are at the bottom of the matrix |
|
|
reduced row echelon form |
A matrix has this form if... 1. It is in echelon form 2. All pivot positions contain a 1 3. The only nonzero term in a pivot column is in the pivot position. |
|
|
Gauss-Jordan Elimination |
If you want to do extra work for no reason. The resulting matrix is in reduced row echelon form. |
|
|
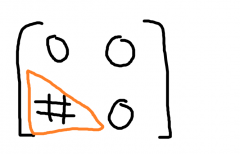
pivot elements |
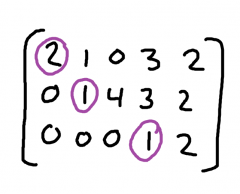
The circled elements |
|
|
trivial solution |
The solution where everything equals 0 and then everyone parties |
|
|
consistent system |
If the system has 1 solution or infinite solutions |
|
|
inconsistent system |
If the system has no solutions |
|
|
system of linear equations |
if you don't know what this is, you're doomed |
|
|
Matrix operations |
You are allowed to... 1. Interchange 2 equations 2. Multiply equations by nonzero constant 3. Add a multiple of one equation to another I mean, duh... |
|
|
linearly independent |
If the only solution to the system is the trivial solution |
|
|
linearly dependent |
If there is a nontrivial solution |
|
|
homogeneous equation |
If the equation equals 0 (there aren't constants) |
|
|
homogeneous system |
If all the equations in the system equal 0 |
|
|
row vector |
a vector that looks like that |
|
|
column vector |
a vector that looks like that |
|
|
algebraic properties of vectors |
literally learned these in every math/physics class since high school |
|
|
linear combination |
yeah man |
|
|
span |
The set of all possible linear combinations of x1u1 + x2u2 + . . . + xmum in R^n written as: span{u1, u2, ... , um} |
|
|
How do you tell if a given vector is in the span of vectors? |
Look at the augmented matrix. The system has a solution iff the given vector is in the span. |
|
|
Theorems about span |
1. If u1, u2, ... un are vectors in R^n and b is in span{u1, ... un} then span{u1...um} = span{b, u1,...um} 2. If u1, ... um are vectors in R^n and m < n, then u1,...um do not span R^n |
|
|
nxm matrix |
Has n rows and m columns |
|
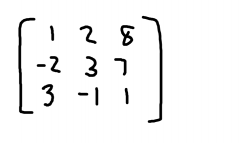
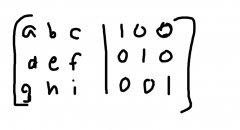
Does the matrix span R^3? |
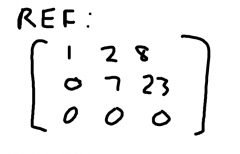
No. Since row of 0's, there exists a vector not in the span of the column vectors, so the columns of the matrix do not span R^3 |
|
|
Theorems about linear independence/dependence |
1. Suppose {0, u1, ... um} is a set of vectors in R^n. Then this set is linearly dependent. 2. Suppose {u1, u2, ... um} is a set of vectors in R^n. If n < m, then the set of vectors is linearly dependent. 3. Let {u1, ... um} be a set of vectors in R^n. The set is linearly dependent iff one of the vectors is in the span of the other vectors |
|
|
particular solution |
a fixed solution to the system |
|
|
homogeneous solution |
the solution to the homogeneous system |
|
|
Theorem about vectors... |
Let a1, a2, ... am and b be vectors in R^n. Then the following statements are equivalent. 1. the set {a1, ... am} is linearly independent 2. the vector equation x1a1 + ... + xmam =b has at most 1 solution. 3. The linear system corresponding to [a1, a2, ... am, b] has at most 1 solution 4. The equation Ax = b with A = [a1, a2, ... am] has at most 1 solution |
|
|
Big Theorem |
Let a be a set of vectors in R^n and let A = [a1, ... an] and let T: R^n -> R^n be given by T(x) = Ax Then the following are equivalent.... a.) a spans R^n b.) a is linearly independent c.) Ax = b has a unique solution for all b in R^n d.) T is one-to-one e.) T is onto f.) matrix A is invertible g.) Ker(T) = {0} h.) A is a basis for R^n |
|
|
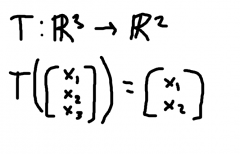
linear transformation |
A function T: R^m -> R^n is a linear transformation if for all vectors u and v in R^n and all scalars r, (a) T(u + v) = T(u) + T(v) (b) T(ru) = rT(u) or combine (a) and (b) to get: T(ru + sv) = rT(u) + sT(v) |
|
|
domain |
is R^m |
|
|
codomain |
is R^n |
|
|
image of u under T |
is T(u) |
|
|
range of T |
The set of all image vectors. Denoted range(T) All y such that T(x) = y where T: R^m -> R^n |
|
|
linear transformation theorems |
1. Let A be an nxm matrix and define T(x) = Ax. Then T: R^m -> R^n is a linear transformation. 2. Let A = [a1 ... am] be an nxm matix and let T:R^m -> R^n with T(x) = Ax be a linear trans. (a.) The vector w is in range(T) iff Ax = w is a consistent linear system (b.) range(T) = span{a1, ..., am} |
|
|
one-to-one |
If T:R^m -> R^n is a linear transformation, T is one-to-one if for every vector w in R^n, there exists at most one vector u in R^n such that T(u) = w. Also, if T(u) = T(v) then u = v |
|
|
onto |
If T: R^m -> R^n is a linear transformation, T is onto if for every vector w in R^n there exists at least one vector u in R^m such that T(u) = w. |
|
|
Theorem about one-to-one |
Let A be an nxm matrix and define T: R^m -> R^n by T(x) = Ax. Then... (a.) T is 1-1 iff the columns of A are linearly independent (b.) If n < m then T is not one-to-one |
|
|
Theorem about onto |
Let A be an nxm matrix and define T: R^m -> R^n by T(x) = Ax. Then... (a.) T is onto iff the columns of A span the codomain R^n (b.) If n > m, then T is not onto |
|
|
How could a transformation be both one-to-one and onto? |
The number of columns and the number of rows in the matrix must equal each other. Square matrices for life. |
|
|
projection transformation |
Something that's like that |
|
|
matrix multiplication |
(mxn)(nxp) = mxp |
|
|
Samantha |
a genius |
|
|
Identity matrix |
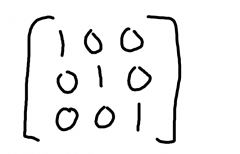
durdurdur |
|
|
Matrix properties |
A(BC) = (AB)C A(B + C) = AB + BC (A + B)C = AC + BC s(AB) = (sA)B or (A)(sB) AI = A IA = A |
|
|
Theorem with non-zero matrices |
Let A, B, and C be non-zero matrices. (a.) It is possible that AB doesn't equal BA (b.) AB = 0 doesn't imply A = 0 or B = 0 (c.) AC = BC doesn't imply that A = B or C = 0 |
|
|
Theorem with matrix transforms |
A and B are both nxm matrices and C is an mxk matrix and s is a scalar (a.) (A+B)^T = A^T + B^T (b.) (sA)^T = s(A^T) (c.) (AC)^T = (C^T)(A^T) |
|
|
transform of matrix |
make the rows the columns |
|
|
diagonal matrix |
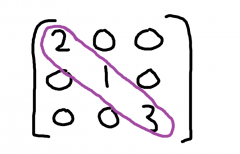
diagonal with rest zeros |
|
|
upper triangular matrix |
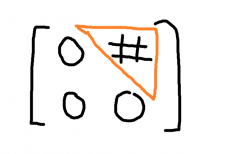
numbers in upper right make a triangle |
|
|
lower triangular matrix |
numbers in lower left make a triangle |
|
|
invertible transformation |
If T: R^m -> R^n is one-to-one and onto |
|
|
inverse function for transformation |
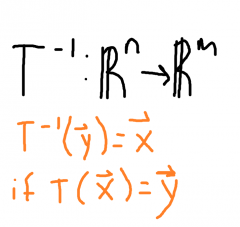
yep |
|
|
inverse/linear transformation theorem |
Let T: R^m -> R^n be a linear transformation. Then... (a.) T has an inverse only if m = n (b.) If T is invertible, then T^-1 is also a linear transformation |
|
|
invertible matrix |
An nxm matrix A is invertible if there exists an nxm matrix B such that AB = In |
|
|
invertible matrix (obvious) theroem |
Suppose A is invertible with AB = In. Then BA = In and the matrix B is such that AB = BA = In and B is unique. |
|
|
inverse of matrix |
If the nxm matrix A is invertible, then A^-1 is called the inverse of A and is the unique matrix such that A(A^-1) = In and (A^-1)A = In |
|
|
nonsingular |
a matrix that is invertible |
|
|
singular |
a matrix that is not invertible |
|
|
Theorem about lots of invertible matrix stuff |
Let A and B be invertible nxn matrices and C and D be nxm matrices. Then... (a.) AB is also invertible, (AB)^-1 = (B^-1)(A^-1) (b.) A^-1 is invertible with (A^-1)^-1 = A (c.) If AC = AD, then C = D (d.) If AC = 0nxm then C = 0nxm |
|
|
How to find the inverse of a matrix |
There's some "shortcut" for a 2x2 matrix, but that's just another poop formula to memorize and no one wants that. |
|
|
Elementary Matrices |
E3 * E2 * E1 * A = u. u is A in REF. E's are identity matrices transformed by the operations used to turn A into u. (Example in notes from 2/12/16) |
|
|
subspace |
A subset S of R^n is a subspace if... (a.) S contains 0 (the 0 vector) (b.) If u and v are in S, then u + v is also in S (c.) For r, a real number and u in S, ru is also in S |
|
|
subspace theorems |
1. Let S = span{u1, u2, ... um} be a subset of R^n Then S is a subspace of R^n. 2. If A is an nxm matrix, then the set of solutions to the homogeneous linear system Ax = 0 forms a subspace of R^m |
|
|
trivial subspace |
S = {0} is a subspace of R^n. S = R^n is a subspace of R^n. Those 2 are the trivial subspaces of R^n |
|
|
null space |
If A is an nxm matrix, then the set of solutions to Ax = 0 is called the null space of A and is denoted by null(A) still don't really understand how you write this out... she's so dang confusing (and doesn't know what she's doing,) but whatever |
|
|
kernel of T |
The set of vectors x such that T(x) = 0. denoted ker(T) |
|
|
kernel/range theorem |
Let T: R^m -> R^n be a linear transformation. Then... the kernel of T is a subspace of the domain (R^m) and the range of T is a subspace of the codomain (R^n). |
|
|
general theorem... (I don't know... It actually has a special name unlike all the other theorems in my notes...) |
Let T:R^m -> R^n be a linear transformation. Then... T is 1-1 iff ker(T) = {0} |
|
|
basis |
A set B = {u1, ... um} is a basis for a subspace if (a.) B spans S
|
|
|
basis theorems |
Let B = {u1, ... um} be a basis for a subspace S. Then every vector s in S can be written as a linear combination s = s1u1 + ... + snun in exactly one way. |
|
|
subspace of rows theorem |
Let A and B be equivalent matrices (meaning one is transformed to the other by row operations.) Then the subspace spanned by the rows of A is the same as the subspace spanned by the rows of B. |
|
|
dimension theorem |
If S is a subspace of R^n, then every basis of S has the same number of vectors. |
|
|
dimension |
the dimension of S is the number of vectors in a any basis of S. denoted dim(S) |
|
|
equivalent matrices |
2 matrices are equivalent if one is transformed to the other by row operations |
|
|
theorem about equivalent matrices |
Suppose U = [u1, ... um] and V = [v1, ... vm] are 2 equivalent matrices. Then any linear dependence that exists among vectors u1 ... um also exists among vectors v1, ..., vm. yo, this is kinda common sense. |
|
|
theorem about forming basis for a subspace |
Let set U= {u1,...,um} be a set of vectors in a subspace S doesn't equal {0} or R^n. (a.) If U is linearly independent, then either U is a basis for S or additional vectors can be added to U to form a basis (b.) If U spans S, then either U is a basis for S or vectors can be removed from U to form a basis |
|
|
theorem about vectors forming basis that's pretty much the same thing as the other theorem about it |
Let U = {u1,...,un} be a set of vectors in subspace S of dim(S) = m. If U is either linear independent or spans S, then U is a basis for S |
|
|
subspaces/dimension theorem
|
Suppose S1 and S2 are both subspaces of R^n and S1 is a subset of S2. Then... dim(S1) <= dim(S2) and dim(S1) = dim(S2) only if S1 = S2 |
|
|
theorem about subspaces and dimension again |
Let U = {u1, ... um} be a set of vectors in a subspace S of dimension k.
(b.) If m > k, then U is linearly dependent |
|
|
standard basis |
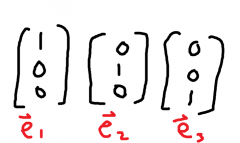
{e1, e2,...,en} form a basis for R^n and are called the standard basis |
|
|
nullity |
the nullity of a matrix A is the dimension of the null space of A denoted by nullity(A) special case: If you get the 0 vector for the null space, then the nullity for the matrix is 0. |