![]()
![]()
![]()
Use LEFT and RIGHT arrow keys to navigate between flashcards;
Use UP and DOWN arrow keys to flip the card;
H to show hint;
A reads text to speech;
33 Cards in this Set
- Front
- Back
|
What is Real-Time Systems? |
Real-Time Systems is one which the correctness of the system depends not only on the logical result of computation, but also on the time at which results are generated
"Misconceptions of Real-Time Computing" |
|
|
Properties of Real-Time Systems? |
|
|
|
Design phase of Real-Time Systems? |
|
|
|
Examples of application constraints? |
|
|
|
What is timing constraints? |
A task must complete its execution within given time frames e.g. task periodicity or deadline |
|
|
Where timing constraints come from? |
|
|
|
Criticality of constraints? |
Hard
Soft |
|
|
What are critical choices during design time? |
|
|
|
How we verify the system? |
Ad-hoc testing Let the system runs for a while then let the absence of failures prove the correctness
Exhaustive testing Verify all the combinations of input data, time and faults
Formal analysis Using proof machine and schedulability analysis |
|
|
Run-time system shared resources are? |
CPU Time Memory Pool I/O Device Access Data Structure (Table, Buffers, ...) |
|
|
Application-program shared resources are? |
Displays Data Entities Data Structure |
|
|
Resource classification & operations? |
Classification
Operation
|
|
|
How to make acquire non-blocking? |
Let acquire returns a status code that indicates whether the resource is available or not |
|
|
Problems with resource management? |
|
|
|
How to avoid starvation? |
Granting an access in FIFO manner Dynamic priority depends on waiting time |
|
|
Conditions for deadlock to occur? |
|
|
|
Hardware level mutual-exclusion method? |
Single Processor Disable-Interrupt
Multi Processor Atomic Instructions (test-and-set lock) |
|
|
Implement semaphore in C! |
WAIT(s) if s > 0 then: ...s := s-1 else ...block()
SIGNAL(s) if there is blocked tasks ...allowBlockedTask else ...s := s+1
|
|
|
What causes component faults? |
Specification faults
Component faults
Environmental effects
|
|
|
Types of faults? |
Permanent - total failure of component Transient - temporary malfunction Intermittent - repeated occurrences of transient |
|
|
How errors are handled at run-time? |
Error detection erroneous data/program behaviour is detected
Error correction originally data intended is recovered
Fault masking hide erroneous data |
|
|
Consideration for fault-tolerant real-time system? |
|
|
|
Cause of message delay in network? |
OVERHEADS
|
|
|
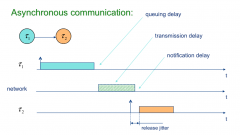
Cause of queueing delay? |
corresponding time slot (FlexRay) transmission token (Token Ring) contention-free transmission (Ethernet) network priority negotiation (CAN) removal from priority queue (Switch Ethernet) |
|
|
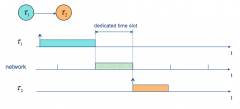
How can you draw synchronous network comm? |
|
|
|
And for asynchronous network? |
|
|
|
How is the message transmitted onto medium? |
Contention-free communication dedicated time slot, one sender for one line e.g. FlexRay, TTP/C, TTCAN
Token-based communication utilize a token for the arbitration of the turn e.g. TokenRing
Collision-based communication used for retransmission and identifier e.g. Ethernet, CAN |
|
|
How CAN protocol works? |
|
|
|
How do we verify the RTS? |
SCHEDULABILITY Analysis |
|
|
Two steps of Schedulability Analysis? |
Introduce an abstract-model e.g. task model, processor, run-time model
Predict whether tasks meet time-constraint e.g. WCET, timing-correct abstract model |
|
|
How do you facilitate schedulability analysis? |
Concurrent and reactive programming + thread & object enabled + WCET should be derived from entities (objects)
Deterministic task execution + time tables with task priorities + preemptives task execution
|
|
|
3 basic states of run-time model are? |
1. Waiting 2. Ready 3. Running |
|
|
Different type of tasks? |
Periodic task - arrive at time interval Ti
Sporadic task - arrive at time interval ≥Ti
Aperiodic task ~ not applicable on hard RTS - intermittent periodicity |